参考文献 Low-Power-Crystal-and-MEMS-Oscillators-Eric-Vittoz-2010.pdf
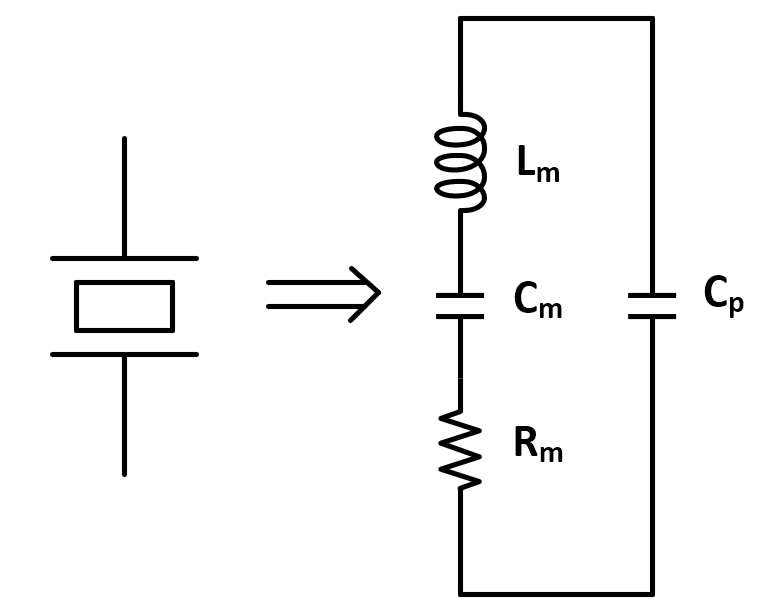
A crystal consists of a plate of piezoresistive (压阻) material with a certain thickness d. Piezoresistive material allows exchange of mechanical and electrical energy. Examples are quartz (SiO2) and ZnO and some nitrides (氮化物). Application of a mechanical pressure to it, generates a voltage across it and vice versa.
Crystal 包含串联的 R m , L m , C m R m , L m , C m C p C p ω m = 1 L m C m ω m = L m C m 1 ω p = 1 L m ( C p C m ) / ( C p + C m ) ω p = L m ( C p C m ) / ( C p + C m ) 1 ω p ω p ω m ω m
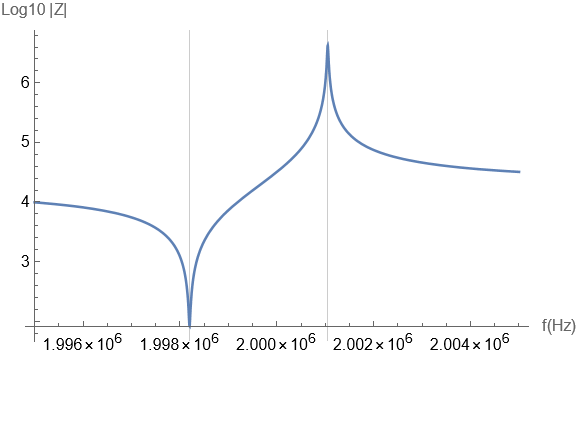
串联谐振导致阻抗频响的Notch,并联谐振频率导致频率导致阻抗频响的Spike,在他们之间阻抗是呈现感性的。
ClearAll["Global`*"]
s = I*\[Omega];
zs = rs + 1/(s*cs) + s*ls // FullSimplify;
Assuming[{rs, cs, cp, ls, \[Omega]} \[Element] PositiveReals,
Conjugate[zs]*zs // FullSimplify]
zp = 1/(s*cp);
zt = zs*zp/(zs + zp);
zt2 = Assuming[{rs, cs, cp, ls, \[Omega]} \[Element] PositiveReals,
Conjugate[zt]*zt // FullSimplify];
zt2Num = Numerator[zt2]
zt2Dem =
Collect[Simplify[Denominator[zt2]/Denominator[zt2][[1]],
Assumptions -> {rs, cs, cp, ls, \[Omega]} > 0], \[Omega]]
ztn = zt /. {cs -> 12.2*10^-15, ls -> 0.52, cp -> 4.27*10^-12,
rs -> 82};
fs = 1/(2*Pi*Sqrt[ls*cs]) /. {cs -> 12.2*10^-15, ls -> 0.52,
cp -> 4.27*10^-12, rs -> 82}
fp = 1/(2*Pi*Sqrt[ls*cs*cp/(cs + cp)]) /. {cs -> 12.2*10^-15,
ls -> 0.52, cp -> 4.27*10^-12, rs -> 82}
Plot[Log10[Abs[ztn]] /. \[Omega] -> 2*Pi*f, {f, 1.995*10^6,
2.005*10^6},
PlotRange -> All,
GridLines -> { {fs, fp} },
AxesLabel -> {"f(Hz)" , "Log10 |Z|"}
]
ω m ω m ω p ω p ω m ω m
这种建模方法,我们是为了从 Barkhansen Criterion 的角度建立一个初步的直观理解,即Resonator中的感性要与驱动电路 Circuit 中的容性相互抵消,满足相位条件,这正是Barkhausen 稳定性判据的第二种表述方式,详见文章 Oscillation-Condition 。
我们需要 Re { Z c } + Re ( Z m ) ≤ 0 Re { Z c } + Re ( Z m ) ≤ 0
Im { Z c } + Im ( Z m ) = 0 Im { Z c } + Im ( Z m ) = 0
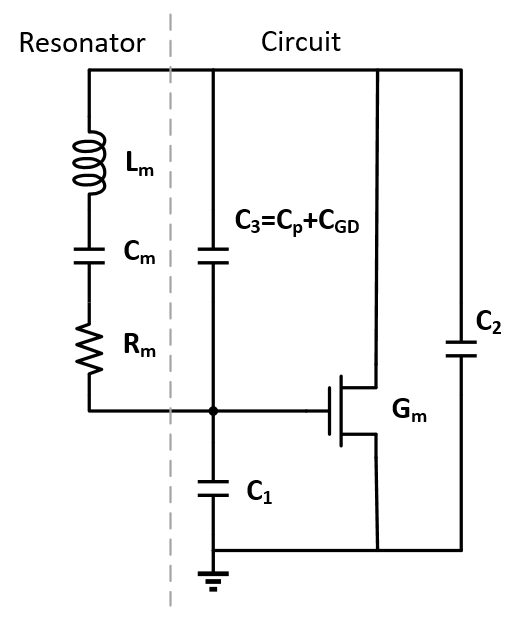
¶ 1.3 Splitting Resonator and Circuit在晶体振荡器中使用的负阻理论,与巴克豪森稳态振荡判据的第二种判据表述是异曲同工的。将电路分成 Resonator 和 Circuit 两部分:
Resonator:R m , L m , C m R m , L m , C m Z m Z m
Circuit:晶振的 C p C p C G D C G D C p C p
当 Circuit 可以提供负阻以抵消掉Resonator用的正阻抗,那么LC的谐振振荡过程将没有能量损失,可以一直维持下去。更详细地解释,在我们推导完 Z m Z m Z c Z c #1.4 Understanding Crystal Driving 和 #1.5 Reaching Stable Oscillation 做更详细的解释。
Resonator 阻抗 Z m Z m
这里我们先去推导出 Z m Z m
Z m = R m + j ω L m + 1 j ω C m = R m + 1 − ω 2 L m C m j ω C m ⇒ ω m = 1 L m C m R m + ω m 2 − ω 2 ω m 2 j ω C m = R m + ( ω m − ω ) ( ω m + ω ) ω m 2 j ω C m ⇒ p = ω − ω m ω m ≪ 1 R m + ( ω m − ω ) 2 ω m ω m 2 j ω C m = R m + j 2 p ω C m (1.3.1) Z m = R m + j ω L m + j ω C m 1 = R m + j ω C m 1 − ω 2 L m C m ω m = L m C m 1 R m + j ω C m ω m 2 ω m 2 − ω 2 = R m + j ω C m ω m 2 ( ω m − ω ) ( ω m + ω ) p = ω m ω − ω m ≪ 1 R m + j ω C m ω m 2 ( ω m − ω ) 2 ω m = R m + j ω C m 2 p ( 1 . 3 . 1 )
这里用到了一个 p = ω − ω m ω m p = ω m ω − ω m p p ω m ω m
此时,由于RLC的Q值很高,具有非常高的选频能力,所以实际上电路是在正弦稳态下工作的,ω ω ω m = 1 L m C m ω m = L m C m 1 p p Z m Z m R m R m
Circuit 阻抗 Z c Z c
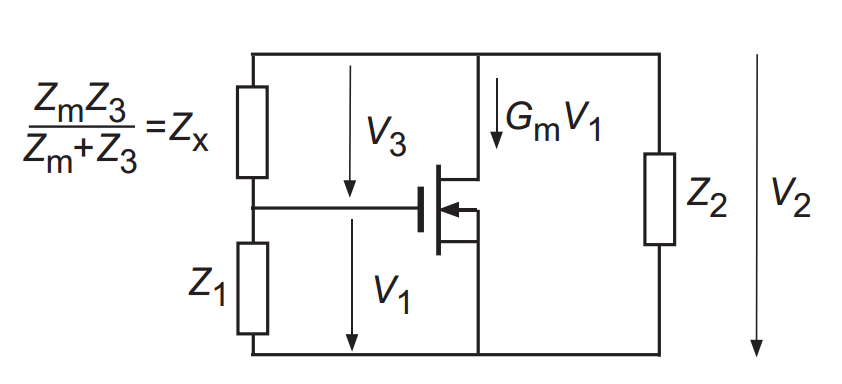
电路部分的阻抗,对应的实部和虚部,通过注入第一个电流,求解两端差分电压的方式,可以求得,这部分用 Mathematica 来实现
ClearAll["Global`*"]
ClearAll["Subscript"]
s = I*\[Omega];
eq1 = s*c3*(v1 - v2) + v2*gm + v1*s*c2 == i;
eq2 = (v2 - v1)*s*c3 + v2*s*c1 == -i;
eq3 = (v1 - v2)/i == r;
sol1 = Solve[{eq1, eq2, eq3}, {r, v1, v2}];
res = sol1[[1, 1, 2]]
realPart =
Assuming[{gm, c1, c2, c3, \[Omega]} \[Element] PositiveReals,
Re[ComplexExpand[res]] // FullSimplify]
ImaginaryPart =
Assuming[{gm, c1, c2, c3, \[Omega]} \[Element] PositiveReals,
Im[ComplexExpand[res]] // FullSimplify]
求解得到
Z c = G m + j ω ( C 1 + C 2 ) − j ω C 3 G m + C 1 C 2 ω 2 + ( C 1 + C 2 ) C 3 ω 2 Re { Z c } = − C 1 C 2 G m C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 Im { Z c } = − G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] (1.3.2) Z c Re { Z c } Im { Z c } = − j ω C 3 G m + C 1 C 2 ω 2 + ( C 1 + C 2 ) C 3 ω 2 G m + j ω ( C 1 + C 2 ) = − C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 C 1 C 2 G m = − ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) ( 1 . 3 . 2 )
¶ 1.4 Understanding Crystal Driving首先需要明确的是,Resonator 是高度线性的(所谓线性指的是其阻抗不随电压/电流的幅值而改变),而且由于其高Q值(意味着非常窄的带宽和非常尖锐的 Impendence Notch),可以认为无论加载在其两边的电压是多么得失真(不是由单一频率的正弦波构成,频率成分非常复杂),其 Admittance 导纳也可以把这个电压转化为非常纯粹的正弦电流,其电流的频率近似等于谐振角频率 ω m ω m
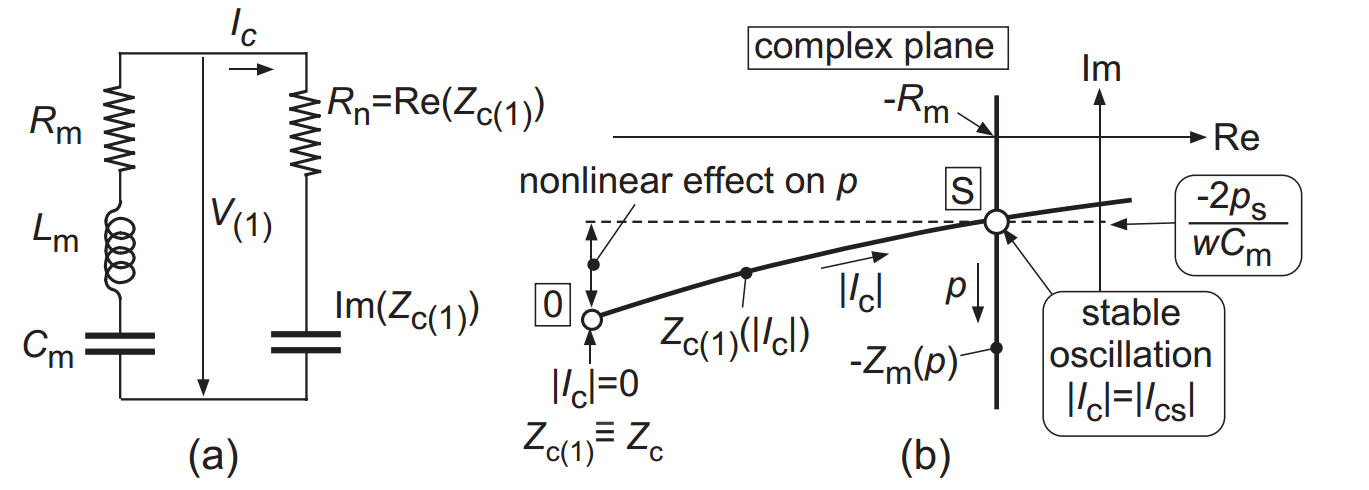
此时电路部分的阻抗 Z c ( ∣ I c ∣ ) Z c ( ∣ I c ∣ ) ∣ I c ∣ ∣ I c ∣ ∣ I c ∣ ∣ I c ∣ Z c ( ∣ I c ∣ ) Z c ( ∣ I c ∣ ) − R m − R m ∣ I c ∣ = 0 ∣ I c ∣ = 0 Re { Z c } Re { Z c } 最负值 ,设计上需要让这个 Re { Z c ( 0 ) } < − R m Re { Z c ( 0 ) } < − R m
#2.1 Circuit Impedance in Complex Plane 解释了 ∣ R e { Z c } ∣ ∣ R e { Z c } ∣ G m G m #3.1 Non-Linear Overview 解释了 G m G m ∣ I c ∣ ∣ I c ∣ G m G m
如果抽象点,Resonator中的实部正电阻 消耗能量,Circuit中的实部负阻 补充能量,起初由于整体为负实部,所以Resonator+Circuit构成的Oscillator系统中能量一直在累积。积累到一定程度后,由于电流/电压逐渐增大,加上Circuit是非线性电路,在电路失真 Distortion 的作用下,∣ Re { Z c } ∣ ∣ Re { Z c } ∣ ∣ I c ∣ ∣ I c ∣ R m R m Re { Z c } + R m = 0 Re { Z c } + R m = 0
此时系统构成了稳态振荡,所谓稳态振荡,也就是说系统中的消耗能量的Positive Resistance 和 提供能量的Negtive Resistance 完全相同,此时整个系统中的能量不增不减,电流和电压在 Inductor 和 Capacitor 之间在谐振频率下互换。所以此时系统中将不在有消耗/提供能量的实部,只有虚部。
这时通过引入 pulling factor p = ω − ω m ω m p = ω m ω − ω m Z m = R m + j 2 p ω C m Z m = R m + j ω C m 2 p R m R m
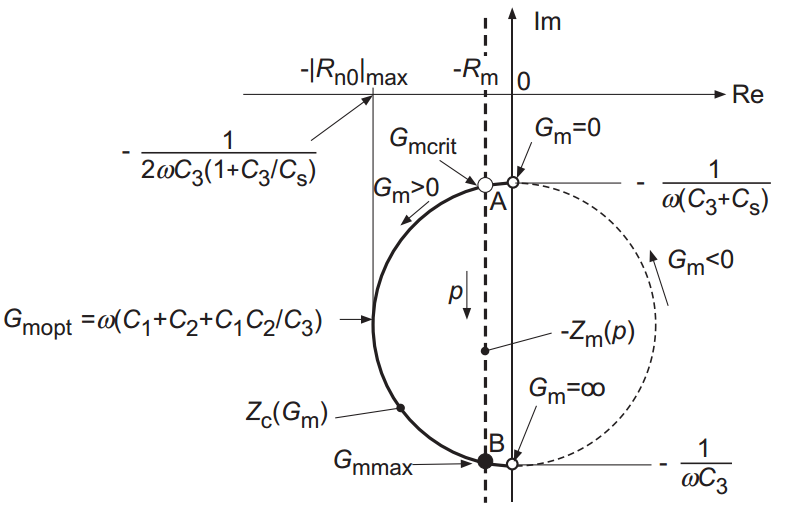
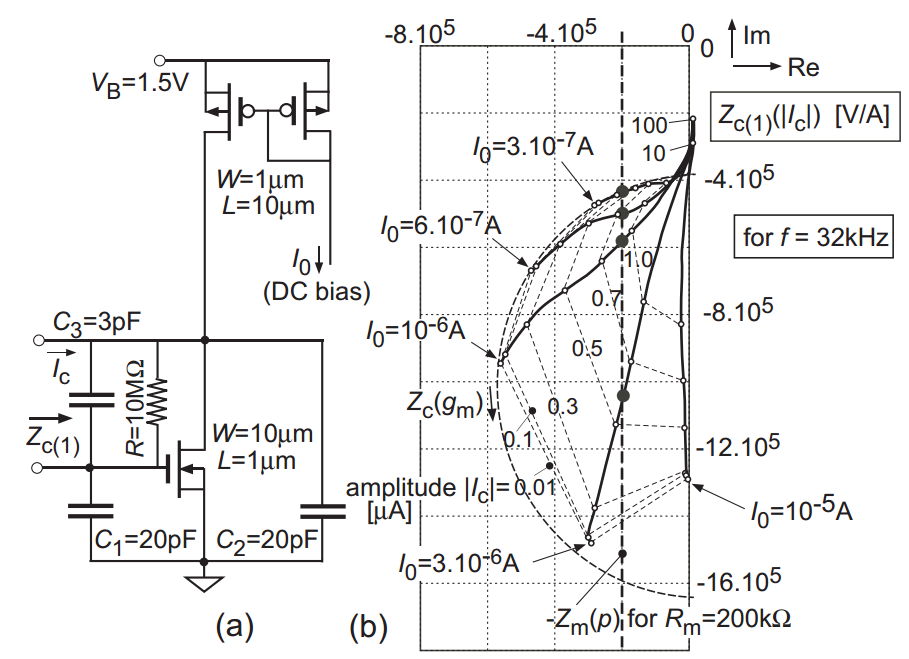
下面这张图来自 Low-Power Crystal and MEMS Oscillators, Eric Vittoz, page 26,这里
I c I c ω m ω m I c I c ∣ I c ∣ ∣ I c ∣
Z c ( 1 ) Z c ( 1 ) Z c Z c ∣ I c ∣ = 0 ∣ I c ∣ = 0 Z c Z c
这里非线性阻抗表示为 ∣ I c ∣ ∣ I c ∣ Z c ( 1 ) ( ∣ I c ∣ ) Z c ( 1 ) ( ∣ I c ∣ ) ∣ I c ∣ ∣ I c ∣
电路开始从Point-0 (满足起振条件 Circuit 有向 Resonator 注入能量的能力,即 R n + R m < 0 R n + R m < 0 G m G m
Re { Z c } + Re { Z c } = 0 ⇒ − C 1 C 2 G m C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 = − R m (1.5.1) ⇒ Re { Z c } + Re { Z c } = 0 − C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 C 1 C 2 G m = − R m ( 1 . 5 . 1 )
代入 G m G m p p
Im { Z c } = − Im ( Z m ) ⇒ − G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] = − 2 p ω C m (1.5.2) ⇒ Im { Z c } = − Im ( Z m ) − ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) = − ω C m 2 p ( 1 . 5 . 2 )
然后通过 p p ω ω
{ p = ω − ω m ω m ω m = 1 L m C m (1.5.3) ⎩ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎧ p = ω m ω − ω m ω m = L m C m 1 ( 1 . 5 . 3 )
这里我们给出一个近似的工作频率表达式,利用了 #2.2 Pulling Factor and Sensitivity 中的结论
ω = ( 1 + p ) ω m ≈ ( 1 + C m 2 ( C s + C 3 ) ) 1 L m C m ≈ ( 1 + C m 2 ( C 1 C 2 C 1 + C 2 + ( C p + C G D ) ) ) 1 L m C m ω = ( 1 + p ) ω m ≈ ( 1 + 2 ( C s + C 3 ) C m ) L m C m 1 ≈ ⎝ ⎜ ⎜ ⎜ ⎜ ⎜ ⎛ 1 + 2 ( C 1 + C 2 C 1 C 2 + ( C p + C G D ) ) C m ⎠ ⎟ ⎟ ⎟ ⎟ ⎟ ⎞ L m C m 1
这里的 C s C s C 1 , 2 C 1 , 2 C 3 C 3 C p C p C G D C G D #1.3 Splitting Resonator and Circuit 中的电路示意图。
在直观理解振荡过程时,我们分析的是Z c ( I c ) Z c ( I c ) Z c ( G m ) Z c ( G m )
Resonator/Circuit 的阻抗在 #1.3 Splitting Resonator and Circuit 中已经求出,这里为了方便重写一遍
Z c = G m + j ω ( C 1 + C 2 ) − j ω C 3 G m + C 1 C 2 ω 2 + ( C 1 + C 2 ) C 3 ω 2 Re { Z c } = − C 1 C 2 G m C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 Im { Z c } = − G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] (2.1.1) Z c Re { Z c } Im { Z c } = − j ω C 3 G m + C 1 C 2 ω 2 + ( C 1 + C 2 ) C 3 ω 2 G m + j ω ( C 1 + C 2 ) = − C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 C 1 C 2 G m = − ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) ( 2 . 1 . 1 )
为了求解负阻的最大值,可以通过求导数的方式
sol2 = Assuming[{gm, c1, c2, c3, \[Omega]} \[Element] PositiveReals,
Solve[D[realPart, gm] == 0, gm]];
gmOptimal = sol2[[1, 1, 2]] // Simplify
realPartMax =
Assuming[{gm, c1, c2, c3, \[Omega]} \[Element] PositiveReals,
FullSimplify[realPart /. sol2]]
求解得到
− ∣ R n 0 ∣ m a x = − 1 2 ω C 3 ( 1 + C 3 C 1 + C 2 C 1 C 2 ) = − 1 2 ω C 3 ( 1 + C 3 C s ) G m , o p t = ( C 1 + C 2 + C 1 C 2 C 3 ) ω (2.1.2) − ∣ R n 0 ∣ m a x G m , o p t = − 2 ω C 3 ( 1 + C 3 C 1 C 2 C 1 + C 2 ) 1 = − 2 ω C 3 ( 1 + C s C 3 ) 1 = ( C 1 + C 2 + C 3 C 1 C 2 ) ω ( 2 . 1 . 2 )
首先这是观察到 Z c Z c G m G m G m G m
当 G m = 0 G m = 0 Z c Z c Z c Z c
Im { Z c } ∣ G m = 0 = − G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] = − 1 ω C 1 + C 2 C 1 C 2 + C 3 ( C 1 + C 2 ) = − 1 ω 1 C 1 C 2 C 1 + C 2 + C 3 = − 1 ω ( C s + C 3 ) (2.1.3) Im { Z c } ∣ G m = 0 = − ω [ C 3 2 G m 2 + ( C 2 C 3 + C 1 ( C 2 + C 3 ) ) 2 ω 2 ] G m 2 C 3 + ω 2 ( C 1 + C 2 ) ( C 1 C 2 + C 2 C 3 + C 3 C 1 ) = − ω 1 C 1 C 2 + C 3 ( C 1 + C 2 ) C 1 + C 2 = − ω 1 C 1 + C 2 C 1 C 2 + C 3 1 = − ω ( C s + C 3 ) 1 ( 2 . 1 . 3 )
同理当 G m = ∞ G m = ∞
¶ 2.2 Pulling Factor and Sensitivity这里可以得到在A点的 Pulling Factor 的表达式
p = − ω C m 2 Im ( Z c ∣ A ) (2.2.1) p = − 2 ω C m Im ( Z c ∣ A ) ( 2 . 2 . 1 )
交点位置与 Resonator 的的阻抗 R m R m
计算如下
d p d Q / Q = − ω C m 2 d Im ( Z c ∣ A ) − d R m R m = ω C m R m 2 d Im ( Z c ∣ A ) d R m = 1 2 Q d Im ( Z c ∣ A ) d Re ( Z c ∣ A ) (2.2.2) d Q / Q d p = − R m d R m − 2 ω C m d Im ( Z c ∣ A ) = 2 ω C m R m d R m d Im ( Z c ∣ A ) = 2 Q 1 d Re ( Z c ∣ A ) d Im ( Z c ∣ A ) ( 2 . 2 . 2 )
另外一种表示这个电路阻抗虚部的方式,是利用其对称圆的特性,用当前的负阻和负阻的最大值去定义(通过简单的勾股定理即可得出)
Im { Z c } = − 1 ω ( C s + C 3 ) − ∣ R n 0 ∣ m a x [ 1 ± 1 − ( ∣ R n 0 ∣ ∣ R n 0 ∣ m a x ) 2 ] (2.2.3) Im { Z c } = − ω ( C s + C 3 ) 1 − ∣ R n 0 ∣ m a x ⎣ ⎢ ⎡ 1 ± 1 − ( ∣ R n 0 ∣ m a x ∣ R n 0 ∣ ) 2 ⎦ ⎥ ⎤ ( 2 . 2 . 3 )
这样,Sensitivity 表达式中的斜率可以重新写为
d p d Q / Q = 1 2 Q d Im { Z c } d R n 0 = 1 2 Q ± 1 ( ∣ R n 0 ∣ m a x ∣ R n 0 ∣ ) 2 − 1 (2.2.4) d Q / Q d p = 2 Q 1 d R n 0 d Im { Z c } = 2 Q 1 ( ∣ R n 0 ∣ ∣ R n 0 ∣ m a x ) 2 − 1 ± 1 ( 2 . 2 . 4 )
电路设计时为了保证稳定的起振,需要让电路可以提供的 ∣ R n 0 ∣ m a x ∣ R n 0 ∣ m a x R m R m K m K m
K m = ∣ R n 0 ∣ m a x R m = 1 2 ω C 3 ( 1 + C 3 C s ) R m ≫ 1 ⇒ M = 1 / ( ω C 3 R m ) M 2 ( 1 + C 3 C s ) ≫ 1 (2.2.5) K m = R m ∣ R n 0 ∣ m a x = 2 ω C 3 ( 1 + C s C 3 ) R m 1 ≫ 1 M = 1 / ( ω C 3 R m ) 2 ( 1 + C s C 3 ) M ≫ 1 ( 2 . 2 . 5 )
这里有引入了一个晶振的 Figure of Merit 的函数,表征的是流过 Z m Z m Z p Z p
M = 1 ω C p R m = L m C m C p R m C m C m = Q C m C p (2.2.6) M = ω C p R m 1 = C p R m L m C m C m C m = C p Q C m ( 2 . 2 . 6 )
这样,重新改写 Sensitivity 的表达式,得到一个非常简单的表达式,只与设计裕度和Q值有关
d p d Q / Q = 1 2 Q K m 2 − 1 (2.2.7) d Q / Q d p = 2 Q K m 2 − 1 1 ( 2 . 2 . 7 )
利用虚部表达式(2.2.3)和设计裕度表达式(2.2.5),再将负阻最大值的表达式(2.1.2)代入(2.2.1),可以得到简化的虚部表达式
p c = C m 2 ( C s + C 3 ) + C m 4 C 3 ( 1 + C 3 / C s ) ( 1 − 1 − 1 K m 2 ) ⇒ K m 2 ≫ 1 p c ≈ C m 2 ( C s + C 3 ) (2.2.8) p c K m 2 ≫ 1 p c = 2 ( C s + C 3 ) C m + 4 C 3 ( 1 + C 3 / C s ) C m ( 1 − 1 − K m 2 1 ) ≈ 2 ( C s + C 3 ) C m ( 2 . 2 . 8 )
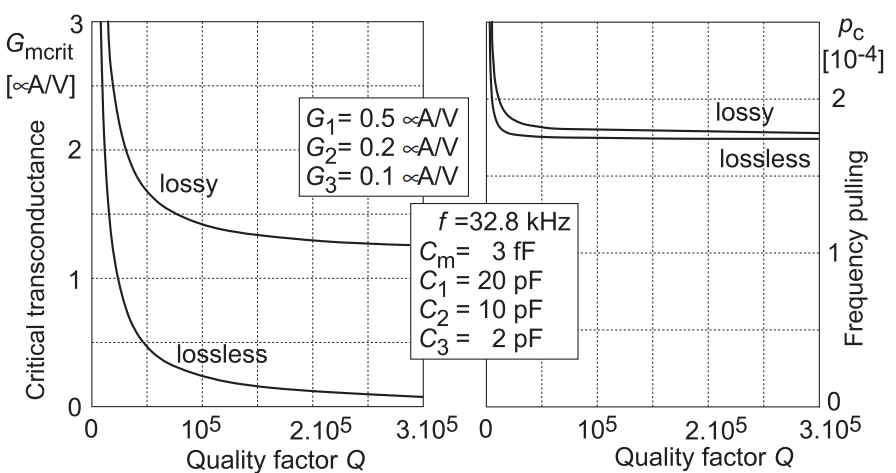
这样得到一个结果是 Pulling Factor 与Q无关,这也符合预期,因为在(2.2.7)中已经发现当K m 2 ≫ 1 K m 2 ≫ 1
¶ 2.3 Critical and Maximum Gm
利用实部表达式(2.1.1)等于 − R m − R m
G m = C 1 C 2 2 R m C 3 2 ± C 1 2 C 2 2 4 C 3 4 R m 2 − ( C 1 C 2 + C 2 C 3 + C 1 C 3 ) 2 ω 2 C 3 2 = C 1 C 2 2 R m C 3 2 ± C 1 C 2 2 R m C 3 2 1 − ( C 1 C 2 + C 2 C 3 + C 1 C 3 ) 2 ω 2 C 3 2 4 C 3 4 R m 2 C 1 2 C 2 2 = C 1 C 2 2 R m C 3 2 ± C 1 C 2 2 R m C 3 2 1 − ( 2 ( C 1 C 2 + C 2 C 3 + C 1 C 3 ) ω C 3 R m C 1 C 2 ) 2 = C 1 C 2 2 R m C 3 2 ± C 1 C 2 2 R m C 3 2 1 − ( 2 M ( C 1 C 2 C 1 C 2 + C 2 C 3 + C 1 C 3 C 1 C 2 ) ) 2 ⇒ M = 1 / ( ω R m C 3 ) , C s = C 1 ∣ C 2 = C 1 C 2 2 R m C 3 2 ± C 1 C 2 2 R m C 3 2 1 − ( 2 M ( 1 + C 3 C s ) ) 2 = C 1 C 2 2 R m C 3 2 [ 1 ± 1 − ( 2 M ( 1 + C 3 C s ) ) 2 ] ⇒ K m = M / ( 2 ( 1 + C 3 / C s ) ) = C 1 C 2 2 R m C 3 2 [ 1 ± 1 − 1 K m 2 ] (2.3.1) G m = 2 R m C 3 2 C 1 C 2 ± 4 C 3 4 R m 2 C 1 2 C 2 2 − C 3 2 ( C 1 C 2 + C 2 C 3 + C 1 C 3 ) 2 ω 2 = 2 R m C 3 2 C 1 C 2 ± 2 R m C 3 2 C 1 C 2 1 − C 3 2 ( C 1 C 2 + C 2 C 3 + C 1 C 3 ) 2 ω 2 C 1 2 C 2 2 4 C 3 4 R m 2 = 2 R m C 3 2 C 1 C 2 ± 2 R m C 3 2 C 1 C 2 1 − ( C 1 C 2 2 ( C 1 C 2 + C 2 C 3 + C 1 C 3 ) ω C 3 R m ) 2 = 2 R m C 3 2 C 1 C 2 ± 2 R m C 3 2 C 1 C 2 1 − ( M 2 ( C 1 C 2 C 1 C 2 + C 1 C 2 C 2 C 3 + C 1 C 3 ) ) 2 M = 1 / ( ω R m C 3 ) , C s = C 1 ∣ C 2 = 2 R m C 3 2 C 1 C 2 ± 2 R m C 3 2 C 1 C 2 1 − ( M 2 ( 1 + C s C 3 ) ) 2 = 2 R m C 3 2 C 1 C 2 ⎣ ⎢ ⎡ 1 ± 1 − ( M 2 ( 1 + C s C 3 ) ) 2 ⎦ ⎥ ⎤ K m = M / ( 2 ( 1 + C 3 / C s ) ) = 2 R m C 3 2 C 1 C 2 [ 1 ± 1 − K m 2 1 ] ( 2 . 3 . 1 )
当 K m ≫ 1 K m ≫ 1 Series[1 + Sqrt[1 - 1/km^2], km -> Infinity] 这段Mathematica 代码可以得到以下结果
1 + 1 − 1 K m 2 → K m 2 ≫ 1 2 1 − 1 − 1 K m 2 → K m 2 ≫ 1 1 2 K m 2 (2.3.2) 1 + 1 − K m 2 1 1 − 1 − K m 2 1 K m 2 ≫ 1 2 K m 2 ≫ 1 2 K m 2 1 ( 2 . 3 . 2 )
所以B点,也就是 Maximum 的 G_
G m m a x = G m ∣ B = C 1 C 2 R m C 3 2 = ω C 1 C 2 ω R m C 3 C 3 = M ω C 1 C 2 C 3 (2.3.3) G m m a x = G m ∣ B = R m C 3 2 C 1 C 2 = ω R m C 3 C 3 ω C 1 C 2 = M C 3 ω C 1 C 2 ( 2 . 3 . 3 )
所以A点,也就是 Critical 的 G_
G m c r i t 0 = G m ∣ A = C 1 C 2 2 R m C 3 2 1 2 K m 2 = C 1 C 2 2 R m C 3 2 4 ( 1 + C 3 / C s ) 2 2 M 2 = ω C 1 C 2 ω R m C 3 2 ( 1 + C 3 / C s ) 2 M 2 = ω C 1 C 2 C 3 ( 1 + C 3 / C s ) 2 Q C m / C 3 = ω C 1 C 2 Q C m ( 1 + C 3 C s ) 2 (2.3.4) G m c r i t 0 = G m ∣ A = 2 R m C 3 2 C 1 C 2 2 K m 2 1 = 2 R m C 3 2 C 1 C 2 2 M 2 4 ( 1 + C 3 / C s ) 2 = ω R m C 3 2 ω C 1 C 2 M 2 ( 1 + C 3 / C s ) 2 = C 3 ω C 1 C 2 Q C m / C 3 ( 1 + C 3 / C s ) 2 = Q C m ω C 1 C 2 ( 1 + C s C 3 ) 2 ( 2 . 3 . 4 )
这里发现 G m ∣ A G m ∣ A G m ∣ B G m ∣ B
G m ∣ B G m ∣ A = M ω C 1 C 2 C 3 ω C 1 C 2 Q C m ( 1 + C 3 C s ) 2 = M 2 ( 1 + C 3 C s ) 2 ⇒ C 3 ≪ C s ≈ M 2 (2.3.5) G m ∣ A G m ∣ B C 3 ≪ C s = Q C m ω C 1 C 2 ( 1 + C s C 3 ) 2 M C 3 ω C 1 C 2 = ( 1 + C s C 3 ) 2 M 2 ≈ M 2 ( 2 . 3 . 5 )
将(2.3.4)的 G m c r i t 0 G m c r i t 0 ( 1 + C 3 / C s ) ( 1 + C 3 / C s ) p c p c G m c r i t G m c r i t C 1 = C 2 C 1 = C 2
p c ≈ C m 2 ( C s + C 3 ) ⇒ ( 1 + C 3 / C s ) = C m 2 C s p c G m c r i t 0 = ω C 1 C 2 Q C m ( 1 + C 3 C s ) 2 = ω C 1 C 2 Q C m ( C m 2 C s p c ) 2 = ω C m Q p c 2 ( C 1 + C 2 ) 2 4 C 1 C 2 ⇒ C 1 = C 2 G m c r i t 0 , m i n = ω C m Q p c 2 (2.3.6) p c ≈ 2 ( C s + C 3 ) C m G m c r i t 0 C 1 = C 2 G m c r i t 0 , m i n ⇒ ( 1 + C 3 / C s ) = 2 C s p c C m = Q C m ω C 1 C 2 ( 1 + C s C 3 ) 2 = Q C m ω C 1 C 2 ( 2 C s p c C m ) 2 = Q p c 2 ω C m 4 C 1 C 2 ( C 1 + C 2 ) 2 = Q p c 2 ω C m ( 2 . 3 . 6 )
V 2 V 1 = − C 1 C 2 + j C 1 Q C m ( 1 + C 3 C 1 + C 3 C 2 ) 2 (2.4.1) V 1 V 2 = − C 2 C 1 + j Q C m C 1 ( 1 + C 1 C 3 + C 2 C 3 ) 2 ( 2 . 4 . 1 )
对于 lossless circuit with a large margin factor K m K m
V 2 V 1 = − C 1 C 2 = − 1 (2.4.2) V 1 V 2 = − C 2 C 1 = − 1 ( 2 . 4 . 2 )
如果电路中的 C 1 , C 2 , C 3 C 1 , C 2 , C 3 G 1 , G 2 , G 3 G 1 , G 2 , G 3
带来的影响是会让 G m c r i t G m c r i t
具体增加的 G m c r i t G m c r i t
G m c r i t = G m c r i t 0 + Δ G m c r i t = G m c r i t 0 + ( G 1 + G 2 + 4 G 3 ) (2.5.1) G m c r i t = G m c r i t 0 + Δ G m c r i t = G m c r i t 0 + ( G 1 + G 2 + 4 G 3 ) ( 2 . 5 . 1 )
τ = − 2 L m R n + R m (2.6.1) τ = − R n + R m 2 L m ( 2 . 6 . 1 )
在Crystal的负阻分析中,为了去求Crystal的起振时间,论文中给出了这个所谓"显而易见"的时间常数表达式,我尝试去推导,有一点没有想通,以下是过程:
这里我们列出一个闭环的LRC的基尔霍夫电压回路方程,将 R n + R m R n + R m R R
L d I ( t ) d t + R I ( t ) + 1 C ∫ I ( t ) d t = 0 ⇒ Laplace L ( s I ( s ) − I 0 ) + R I ( s ) + 1 C I ( s ) s = 0 (2.6.2) L d t d I ( t ) + R I ( t ) + C 1 ∫ I ( t ) d t = 0 Laplace L ( s I ( s ) − I 0 ) + R I ( s ) + C 1 s I ( s ) = 0 ( 2 . 6 . 2 )
通过下面的代码,求解出的结果为
I ( t ) = e − t 2 L / R I 0 ( cos ( t 4 L C − R 2 2 L ) − 1 4 R 2 L C − 1 sin ( t 4 L C − R 2 2 L ) ) (2.6.3) I ( t ) = e − 2 L / R t I 0 ⎝ ⎜ ⎜ ⎜ ⎛ cos ⎝ ⎜ ⎜ ⎜ ⎛ 2 L t C 4 L − R 2 ⎠ ⎟ ⎟ ⎟ ⎞ − R 2 4 C L − 1 1 sin ⎝ ⎜ ⎜ ⎜ ⎛ 2 L t C 4 L − R 2 ⎠ ⎟ ⎟ ⎟ ⎞ ⎠ ⎟ ⎟ ⎟ ⎞ ( 2 . 6 . 3 )
可以看到前面的衰减项和后面的等幅振荡项
(*Mathematica中不能直接使用大写字母作为变量*)
ClearAll["Global`*"]
cap = Symbol["C"];
res = Symbol["R"];
ind = Symbol["L"];
i0 = Symbol["I0"];
(*列出Lapalce方程并求解*)
eq = (i*s - i0)*ind + res*i + i/(s*cap) == 0;
Print["I(s)=", isolve = Solve[eq, i][[1, 1, 2]]]
(*利用InverseLapalce求解时域*)
Print["I(t)=",
it = Assuming[{res, cap, ind, i0} \[Element] PositiveReals &&
cap*res^2 - 4*ind < 0,
InverseLaplaceTransform[isolve, s, t] // FullSimplify]]
(*验证I(t)的最后一项为等幅震荡项*)
Print["I(t)的最后一项为等幅震荡项:" it[[3]]]
Plot[it[[3]] /. {res -> 0.1, cap -> 1, ind -> 1}, {t, -20, 20}]
这里虽然用了 Laplace 变换去求解微分方程,但是仍然依靠时域的理解去假设了复根的存在,我们还是需要去掌握并理解微分时域方程的求解过程,才能更好地理解二阶电路拓扑。
这里求得 τ τ R m + ( − R n ) R m + ( − R n ) R n R n I c I c τ τ
Equipartition theorem from statistical mechanics. The equipartition theorem says that any
根据这个理论,我们可以看到电容的噪声电压和电感里的噪声电流可以为
C V 2 2 = k T 2 ⇒ V = k T C L I 2 2 = k T 2 ⇒ I = k T L (2.6.4) 2 C V 2 = 2 k T 2 L I 2 = 2 k T ⇒ V = C k T ⇒ I = L k T ( 2 . 6 . 4 )
初步的直观理解为:
震荡的初始电流 I(0)=\sqrt
起初总阻抗小于0增幅振荡,最终阻抗等于0时幅振荡达到稳态
一般需要7~15τ去达到90%的振幅
Nonlinearity Effect Example
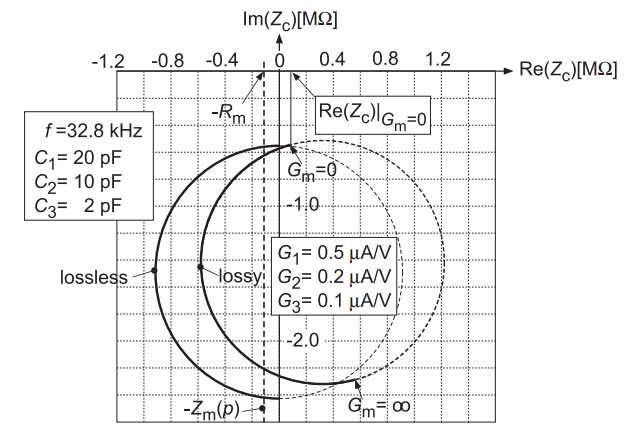
这是一个32KHz 晶振的一个实际仿真结果;
半圆形的虚线是理论的 Z c ( G m ) Z c ( G m ) I 0 I 0
同一个实现上不同点,表示随着 I C I C G m G m − R m − R m
我们可以观察到,如果静态偏置电流越大,其阻抗圆就越偏离理论值,且稳态交点的虚部也就越大,导致频率偏差也就越大;
我们希望与负阻交点处的斜率小一点,这样其与 I C I C
Sinusoidal Gate Voltage
这里,我们接着 #2.4 Relative Oscillator Voltage (conclusion only) 去分析,如果MOS管的输出电流存在失真时,会对栅极电压有怎样的影响?
在 #2.4 Relative Oscillator Voltage (conclusion only) 中,我们知道 fundamental 频率下满足
V 1 / V 2 ∣ F ≈ − C 2 / C 1 (3.1.1) V 1 / V 2 ∣ F ≈ − C 2 / C 1 ( 3 . 1 . 1 )
又因为 Z m Z m
V 1 V 2 ∣ H = C 3 C 1 + C 3 (3.1.2) V 2 V 1 ∣ ∣ ∣ ∣ ∣ H = C 1 + C 3 C 3 ( 3 . 1 . 2 )
因此有如下表达式,如果C 3 C 3 C 1 , 2 ≫ C 3 C 1 , 2 ≫ C 3
V 1 / V 2 ∣ H V 1 / V 2 ∣ F ≈ C 1 C 3 ( C 1 + C 3 ) C 2 (3.1.3) V 1 / V 2 ∣ F V 1 / V 2 ∣ H ≈ ( C 1 + C 3 ) C 2 C 1 C 3 ( 3 . 1 . 3 )
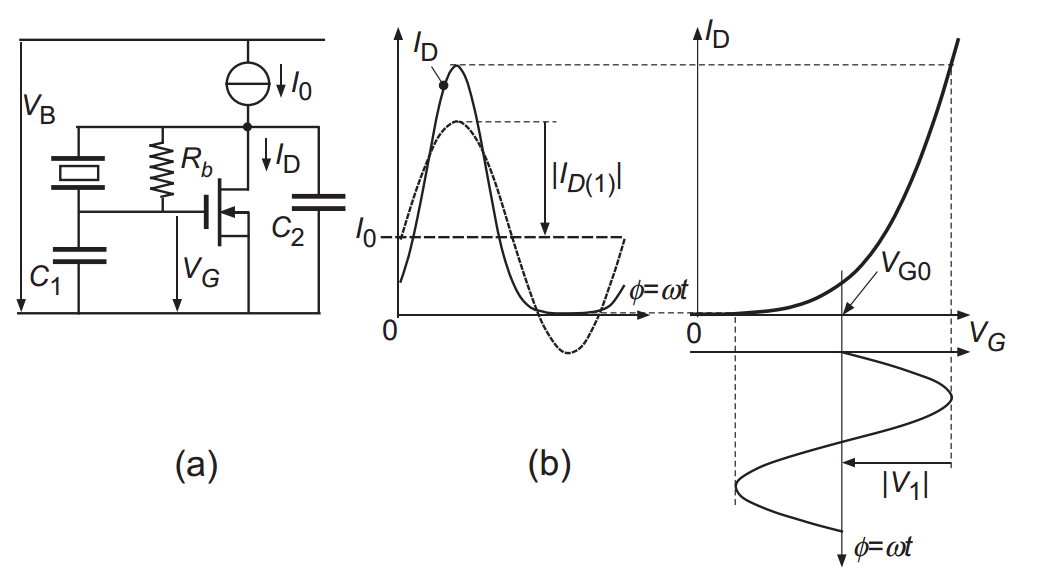
MOS Nonlinearity and Relevant Gm
虽然栅极电压在 Resonator 的作用下,是一个非常近似正弦波的存在。但是一个正弦波的栅极电压经过非线性的gm后,电流是非线性的。
栅极电压是正弦波
V G ( t ) = V G 0 + V 1 sin ω t (3.1.4) V G ( t ) = V G 0 + V 1 sin ω t ( 3 . 1 . 4 )
但是输出的电流会存在非线性
I D ( t ) = I 0 + I D ( 1 ) sin ω t + harmonic components (3.1.5) I D ( t ) = I 0 + I D ( 1 ) sin ω t + harmonic components ( 3 . 1 . 5 )
我们分析真正有用的,能够提供 Fundamental Frequency 电流的 G m ( 1 ) G m ( 1 )
G m ( 1 ) = I D ( 1 ) V 1 (3.1.5) G m ( 1 ) = V 1 I D ( 1 ) ( 3 . 1 . 5 )
代入EKV Model的VI公式 EKV-Model ,可以得到
I D I s p e c = exp V G − V T 0 n U T = exp V G 0 − V T 0 + V 1 sin ϕ n U T = e v e + v 1 sin ϕ (3.2.1) I s p e c I D = exp n U T V G − V T 0 = exp n U T V G 0 − V T 0 + V 1 sin ϕ = e v e + v 1 s i n ϕ ( 3 . 2 . 1 )
这里有
{ ϕ = ω t v e = V G 0 − V T 0 n U T v 1 = V 1 n U T ⎩ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎧ ϕ v e v 1 = ω t = n U T V G 0 − V T 0 = n U T V 1
通过积分的方式,获得DC分量和Fundmental分量
I 0 I s p e c = ∫ 0 2 π e v e + v 1 sin ϕ d ϕ = e v e ⋅ I B 0 ( v 1 ) I D ( 1 ) I s p e c = ∫ 0 2 π e v e + v 1 sin ϕ ⋅ sin ϕ d ϕ = e v e ⋅ 2 I B 1 ( v 1 ) (3.2.2) I s p e c I 0 I s p e c I D ( 1 ) = ∫ 0 2 π e v e + v 1 s i n ϕ d ϕ = e v e ⋅ I B 0 ( v 1 ) = ∫ 0 2 π e v e + v 1 s i n ϕ ⋅ sin ϕ d ϕ = e v e ⋅ 2 I B 1 ( v 1 ) ( 3 . 2 . 2 )
这里的 I B 0 ( v 1 ) I B 0 ( v 1 ) I B 1 ( v 1 ) I B 1 ( v 1 ) BesselI[0,v1] and BesselI[1,v1]
I B 0 ( v 1 ) = 1 + v 1 2 2 2 + v 1 4 2 2 ⋅ 4 2 + v 1 6 2 2 ⋅ 4 2 ⋅ 6 2 + ⋯ I B 1 ( v 1 ) = v 1 2 + v 1 3 2 2 ⋅ 4 + v 1 5 2 2 ⋅ 4 2 ⋅ 6 + v 1 7 2 2 ⋅ 4 2 ⋅ 6 2 ⋅ 8 + ⋯ I B 0 ( v 1 ) I B 1 ( v 1 ) = 1 + 2 2 v 1 2 + 2 2 ⋅ 4 2 v 1 4 + 2 2 ⋅ 4 2 ⋅ 6 2 v 1 6 + ⋯ = 2 v 1 + 2 2 ⋅ 4 v 1 3 + 2 2 ⋅ 4 2 ⋅ 6 v 1 5 + 2 2 ⋅ 4 2 ⋅ 6 2 ⋅ 8 v 1 7 + ⋯
这样,通过,首先通过(3.2.2)消掉 I s p e c I s p e c I D ( 1 ) I D ( 1 )
G m ( 1 ) = 2 I B 1 ( v 1 ) v 1 ⋅ n U T I 0 I B 0 ( v 1 ) = I 0 n U T 2 I B 1 ( v 1 ) v 1 I B 0 ( v 1 ) = G m 2 I B 1 ( v 1 ) v 1 I B 0 ( v 1 ) (3.2.3) G m ( 1 ) = v 1 ⋅ n U T 2 I B 1 ( v 1 ) I B 0 ( v 1 ) I 0 = n U T I 0 v 1 I B 0 ( v 1 ) 2 I B 1 ( v 1 ) = G m v 1 I B 0 ( v 1 ) 2 I B 1 ( v 1 ) ( 3 . 2 . 3 )
接着进一步推导,有一定摆幅下,被非线性衰减后的 G m ( 1 ) G m ( 1 ) G m c r i t G m c r i t I 0 I 0 I 0 c r i t m i n I 0 c r i t m i n
这里的 G m c r i t G m c r i t I 0 c r t i m i n / ( n U T ) I 0 c r t i m i n / ( n U T ) I 0 c r t i m i n I 0 c r t i m i n
G m ( 1 ) = G m c r i t I 0 n U T 2 I B 1 ( v 1 ) v 1 I B 0 ( v 1 ) = I 0 c r i t m i n n U T I 0 I 0 c r i t m i n = I B 0 ( v 1 ) 2 I B 1 ( v 1 ) v 1 (3.2.4) G m ( 1 ) n U T I 0 v 1 I B 0 ( v 1 ) 2 I B 1 ( v 1 ) I 0 c r i t m i n I 0 = G m c r i t = n U T I 0 c r i t m i n = 2 I B 1 ( v 1 ) I B 0 ( v 1 ) v 1 ( 3 . 2 . 4 )
随着 v 1 v 1 I B 0 ( v 1 ) / I B 1 ( v 1 ) → 1 I B 0 ( v 1 ) / I B 1 ( v 1 ) → 1
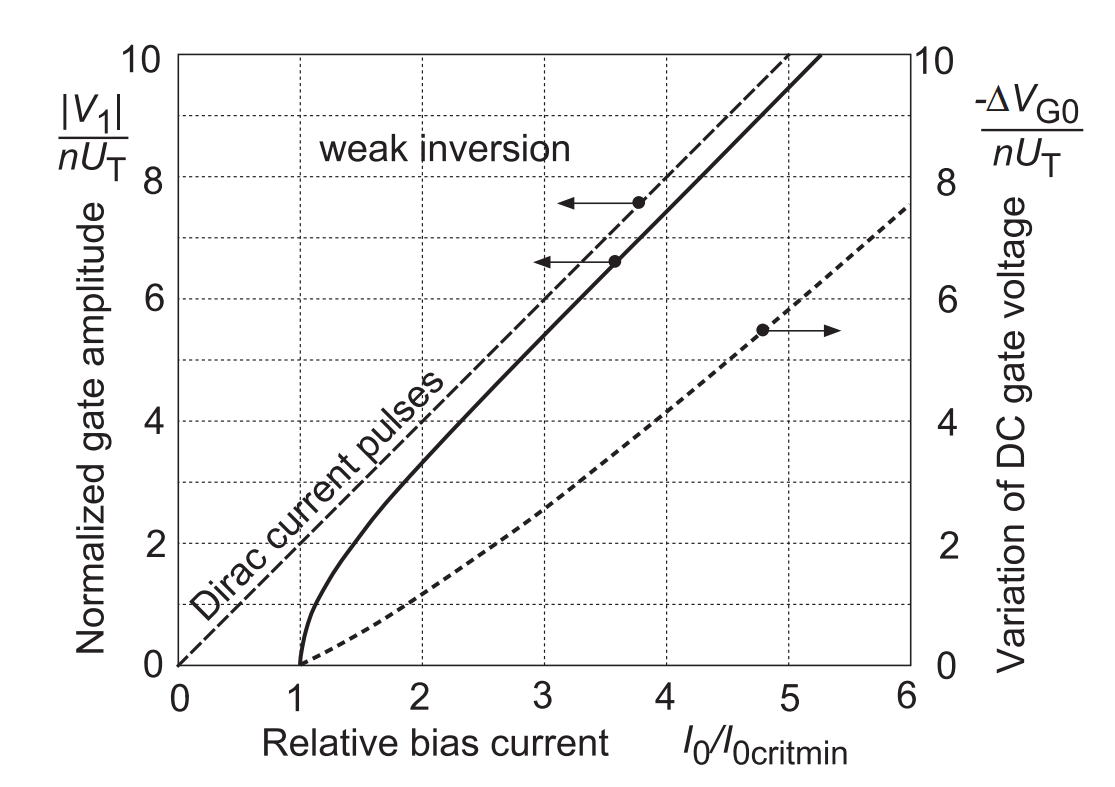
v 1 = ∣ V 1 ∣ n U T = 2 ⋅ I 0 I 0 c r i t m i n (3.2.5) v 1 = n U T ∣ V 1 ∣ = 2 ⋅ I 0 c r i t m i n I 0 ( 3 . 2 . 5 )
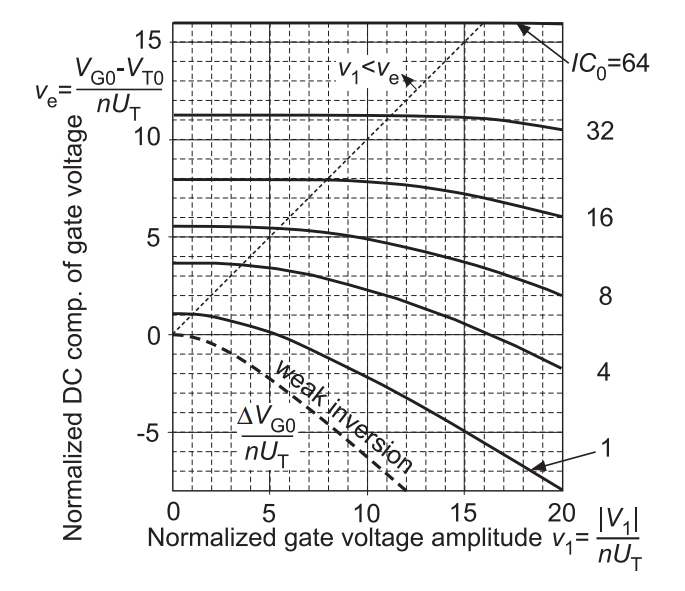
为了观察 DC 栅极电压随着偏置电流的变化,还可以利用同样的思路,但是这次使用公式(3.2.2) 时,并不用 I 0 I 0 I s p e c I s p e c
G m ( 1 ) = G m c r i t I D ( 1 ) V 1 = I 0 c r i t m i n n U T e v e ⋅ 2 I B 1 ⋅ I s p e c V 1 = I 0 c r i t m i n n U T v e = ln I 0 c r i t m i n I s p e c − ln 2 I B 1 ( v 1 ) v 1 V G 0 − V T 0 n U T = V G 0 c r i t i m i n − V T 0 n U T − ln 2 I B 1 ( v 1 ) v 1 (3.2.6) G m ( 1 ) V 1 I D ( 1 ) V 1 e v e ⋅ 2 I B 1 ⋅ I s p e c v e n U T V G 0 − V T 0 = G m c r i t = n U T I 0 c r i t m i n = n U T I 0 c r i t m i n = ln I s p e c I 0 c r i t m i n − ln v 1 2 I B 1 ( v 1 ) = n U T V G 0 c r i t i m i n − V T 0 − ln v 1 2 I B 1 ( v 1 ) ( 3 . 2 . 6 )
这里我们得到了在随着摆幅增大,DC 栅极电压也会逐渐减小,得到 \Delta V_{G0}=-\ln\dfrac{2I_{B1}(v_1)}
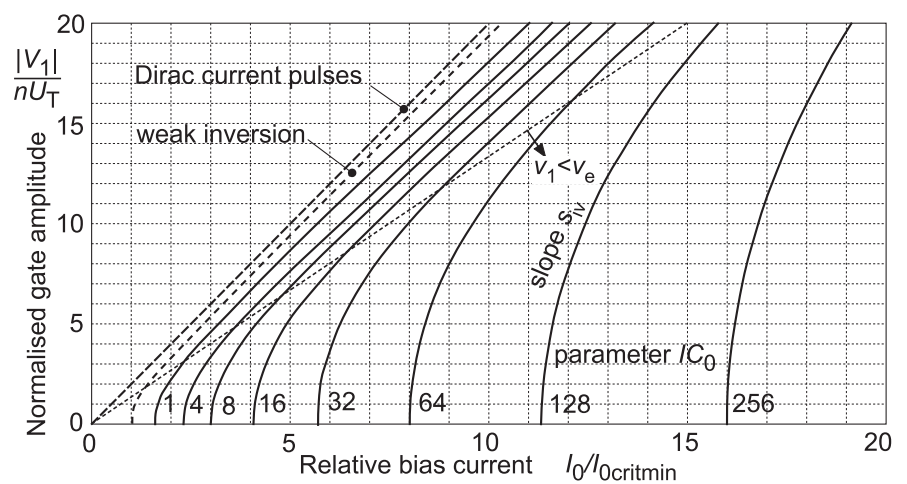
这样去分析这个图:
分坐标是静态偏置电流 I 0 I 0 I 0 c r i t m i n I 0 c r i t m i n
左边的纵坐标表示栅极fundmental frequncy的幅值电压,也就是 v 1 = ∣ V 1 ∣ n U T v 1 = n U T ∣ V 1 ∣ I 0 I 0 c r i t m i n I 0 c r i t m i n I 0
右边的纵坐标表示栅极电压 dc 偏置电压变化量,会随着摆幅增大,逐渐缩小,见公式(3.2.5)
如果代入完整的 EKV 公式,然后继续按照(3.2.2)的方式去积分得到 DC 和 fundmental 电流时,会发现这里的积分比较困难。这里定义了一个 inversion coefficient,I C 0 = I 0 c r i t / I s p e c I C 0 = I 0 c r i t / I s p e c I C 0 = 1 I C 0 = 1 I s p e c I s p e c I C 0 I C 0 I C 0 I C 0
根据 “Low-Power Crystal and MEMS Oscillators", Eric Vittoz, page 65 的结论,可以看到如下情况
Inversion Coefficient 越大,那么达到 v 1 = ∣ V 1 ∣ n U T = 0 v 1 = n U T ∣ V 1 ∣ = 0 I 0 I 0 c r i t m i n ∣ v 1 = 0 I 0 c r i t m i n I 0 ∣ ∣ ∣ ∣ ∣ v 1 = 0
但是我们发现,随着 Inversion Coefficient 增大后,达到起振的偏置电流后,栅极电压的增速也非常快
从图中 I C 0 = 64 I C 0 = 6 4 V 1 = 11 n U T V 1 = 1 1 n U T
从 #3.1 Non-Linear Overview 中,我们已经看到,如果如果偏置电流 I 0 / I c r i t I 0 / I c r i t
于此同时,我们也这种对非线性抑制能力的提高,是以提高整体的偏置电流去实现的
需要额外解释一下 v 1 < v e v 1 < v e ∣ V 1 ∣ ∣ V 1 ∣ V T 0 V T 0 − V 1 − V 1 V D < V d s a t V D < V d s a t
v 1 < v e ∣ V 1 ∣ n U T < V G 0 − V T 0 n U T ∣ V 1 ∣ < V G 0 − V T 0 (3.3.1) v 1 n U T ∣ V 1 ∣ ∣ V 1 ∣ < v e < n U T V G 0 − V T 0 < V G 0 − V T 0 ( 3 . 3 . 1 )
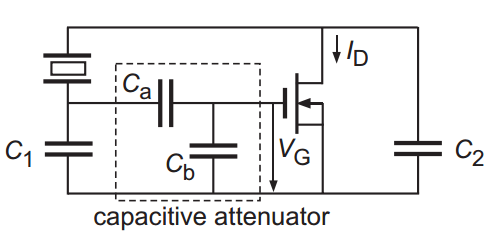
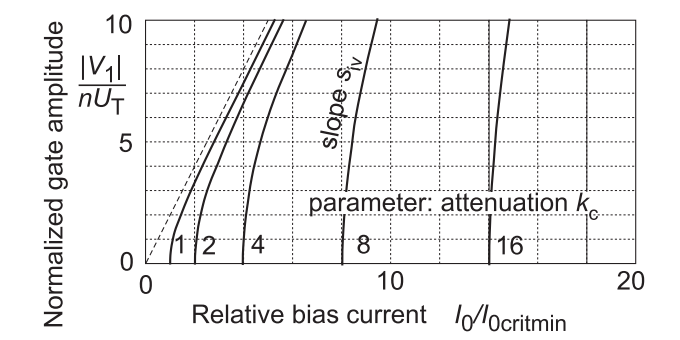
这里补充说明,不通过讲电路设计到饱和区,通过电流的衰减,也可以实现同样的效果,假设管子还是偏置在亚阈值区,通过栅极电压的电容衰减,相当于减小了等效 gm,这样所需要达到 G m c r i t G m c r i t I 0 c r i t m i n I 0 c r i t m i n I 0 c r i t = I 0 c r i t m i n ⋅ k c I 0 c r i t = I 0 c r i t m i n ⋅ k c
这里再次观察DC栅极电压的随摆幅的变化,在不同 Inversion Coeffeicient 下的对比,在强反型下,栅极DC电压比较恒定
¶ 3.4 Energy and PowerRLC能量功率
晶振RLC的谐振时的能量,可以以下公式表示,这里由于谐振频率用 ω 2 = 1 / ( L C ) ω 2 = 1 / ( L C ) Q = 1 / ( ω R C ) Q = 1 / ( ω R C )
E m = L m ∣ I m ∣ 2 2 = ∣ I m ∣ 2 2 ω 2 C m = Q R m ∣ I m ∣ 2 2 ω (3.4.1) E m = 2 L m ∣ I m ∣ 2 = 2 ω 2 C m ∣ I m ∣ 2 = 2 ω Q R m ∣ I m ∣ 2 ( 3 . 4 . 1 )
功率应该满足,正弦电流的RMS值满足 ∣ I m ∣ / 2 ∣ I m ∣ / 2
P m = R m ∣ I m ∣ 2 2 = ∣ I m ∣ 2 2 ω Q C m (3.4.2) P m = 2 R m ∣ I m ∣ 2 = 2 ω Q C m ∣ I m ∣ 2 ( 3 . 4 . 2 )
在每个振荡周期 2 π / ω 2 π / ω Δ E m Δ E m
Δ E m = 2 π ω P m = ∣ I m ∣ 2 2 ω 2 C m ⋅ 2 π Q = 2 π Q E m (3.4.3) Δ E m = ω 2 π P m = 2 ω 2 C m ∣ I m ∣ 2 ⋅ Q 2 π = Q 2 π E m ( 3 . 4 . 3 )
晶振能量功率
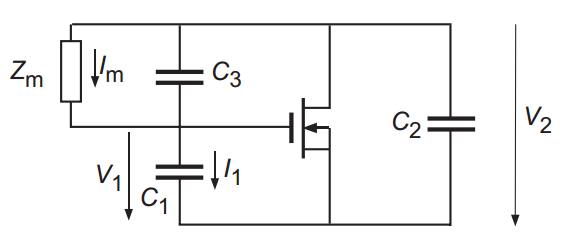
依据以下电路,我们可以得到
I 1 = ( 1 + j ω C 3 Z m ) I m (3.4.4) I 1 = ( 1 + j ω C 3 Z m ) I m ( 3 . 4 . 4 )
与此同时,达到稳态振荡时,这里的 Z m Z m R m R m #2.1 Circuit Impendace in Complex Plane 中的公式(2.1.3),如果 R m ≪ ∣ R n 0 ∣ m a x R m ≪ ∣ R n 0 ∣ m a x G m = 0 G m = 0 Z m Z m
Z m ≈ R m − 1 j ω ( C 3 + C s ) (3.4.5) Z m ≈ R m − j ω ( C 3 + C s ) 1 ( 3 . 4 . 5 )
将(3.4.2)代入(3.4.1),同时根据 #2.3 Figure of Merit 中的定义可以得到
I 1 I m = ( 1 − C 3 C s + C 3 + j ω C 3 R m ) = ( C s C 3 + C 3 + j M ) I m I 1 = ( 1 − C s + C 3 C 3 + j ω C 3 R m ) = ( C 3 + C 3 C s + M j )
所以其 amplitude 满足,如果 Figure of Merit M ≫ 2 M ≫ 2
∣ I 1 ∣ ∣ I m ∣ = ( 1 − C 3 C s + C 3 + j ω C 3 R m ) = ( C s C s + C 3 ) 2 + 1 M 2 ≈ C s C s + C 3 (3.4.6) ∣ I m ∣ ∣ I 1 ∣ = ( 1 − C s + C 3 C 3 + j ω C 3 R m ) = ( C s + C 3 C s ) 2 + M 2 1 ≈ C s + C 3 C s ( 3 . 4 . 6 )
这里又有 I 1 = j ω C 1 V 1 I 1 = j ω C 1 V 1 ∣ I 1 ∣ = ω C 1 ∣ V 1 ∣ ∣ I 1 ∣ = ω C 1 ∣ V 1 ∣
∣ I m ∣ = ( 1 + C 3 C s ) ∣ I 1 ∣ = ( 1 + C 3 C s ) ω C 1 ∣ V 1 ∣ (3.4.7) ∣ I m ∣ = ( 1 + C s C 3 ) ∣ I 1 ∣ = ( 1 + C s C 3 ) ω C 1 ∣ V 1 ∣ ( 3 . 4 . 7 )
这样代入∣ I m ∣ ∣ I m ∣
E m = ( 1 + C 3 C s ) 2 ω 2 C 1 2 ∣ V 1 ∣ 2 ⋅ 1 2 ω 2 C m = ( 1 + C 3 C s ) 2 C 1 2 2 C m ∣ V 1 ∣ 2 (3.4.8) E m = ( 1 + C s C 3 ) 2 ω 2 C 1 2 ∣ V 1 ∣ 2 ⋅ 2 ω 2 C m 1 = ( 1 + C s C 3 ) 2 2 C m C 1 2 ∣ V 1 ∣ 2 ( 3 . 4 . 8 )
功率,代入∣ I m ∣ ∣ I m ∣ ∣ V 1 ∣ ∣ V 1 ∣
P m = ( 1 + C 3 C s ) 2 ω 2 C 1 2 R m 2 ∣ V 1 ∣ 2 (3.4.9) P m = ( 1 + C s C 3 ) 2 2 ω 2 C 1 2 R m ∣ V 1 ∣ 2 ( 3 . 4 . 9 )
频率的稳定性分为以下3个部分,这里逐一解释
晶振本身的温度特性,尤其是 Motional Resistance,电容和电感还相对恒定,但是运动阻抗随温度是有变化的,在高精度应用中需要需要温度补偿电路
晶振的老化,aging特性,这个可能可以通过以下 pre-aging 的错是解决;
正如 #3.1 Non-Linear Overview 中看到的,虚部的位置收到非线性的影响非常大
首先最大的一部分,就是驱动MOS管的VI I D ( V G ) I D ( V G ) #3.3 Transistor in Moderate or Strong Inversion 中那个不同图,首先选择合适的摆幅,然后找到 I 0 / I 0 c r i t I 0 / I 0 c r i t I C 0 I C 0 #3.1 Non-Linear Overview 中的公式(3.1.3)我们也可以看到,选择较小的 C 3 C 3 C 1 , 2 C 1 , 2
通过 #2.2 Pulling Factor and Sensitivity 中的公式(2.2.8)我们可以看到 p c p c C s C s C 1 , 2 C 1 , 2 C 3 C 3
还是从 #2.2 Pulling Factor and Sensitivity 中,可以看到如果阻抗圆的半径比较大,那么在交点处的虚部的弧度随Gm变化率比较小,那么也有助于提高频率的的稳定性,这个可以通过减小C 3 C 3
减小 R m R m
减少损耗,这个可以通过 #2.6 Losses Circit Gm (conclusion only) 中看到,这个可以让阻抗圆形对于虚轴更加中心对称
通过对 #2.2 Pulling Factor and Sensitivity 中的公式(2.2.8) 分别求偏微分,可以得到
d p c = − p c ( C 2 C 1 ( C 1 + C 2 ) d C 1 + C 2 C 1 ( C 1 + C 2 ) d C 1 + 1 C 3 d C 3 ) d p c = − p c ( C 1 ( C 1 + C 2 ) C 2 d C 1 + C 1 ( C 1 + C 2 ) C 2 d C 1 + C 3 1 d C 3 )