幅值上,Vin=0或者
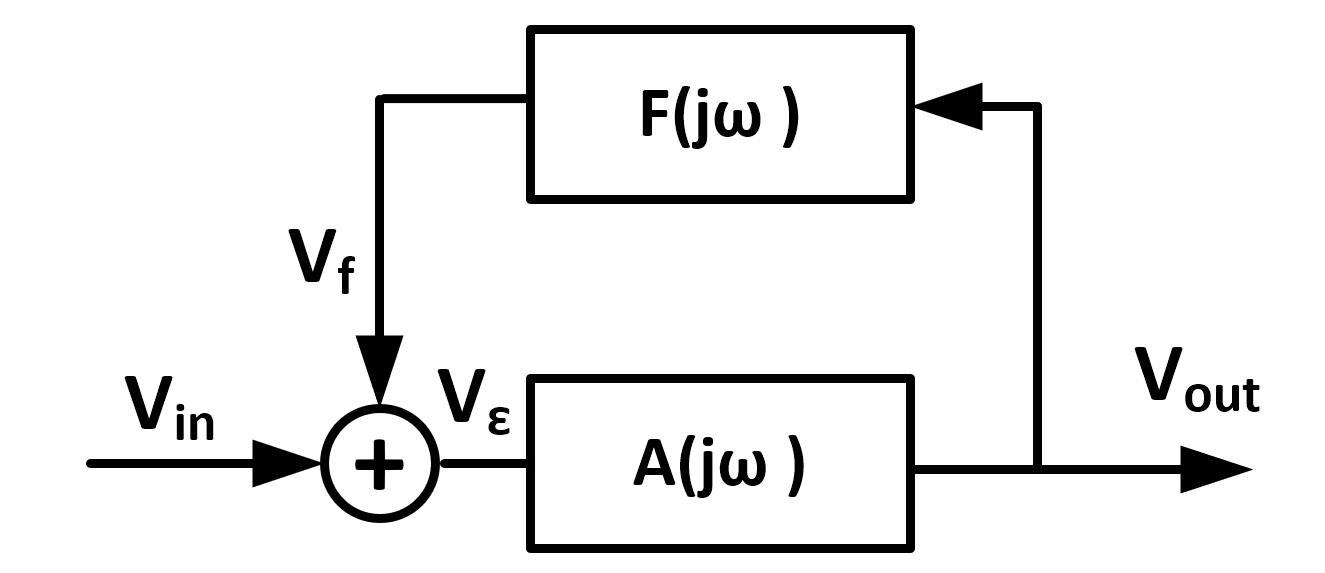
⎩⎪⎪⎪⎨⎪⎪⎪⎧Magnitude:Phase:∣∣∣∣∣VϵVf∣∣∣∣∣=∣A(jω)∣∣F(jω)∣≥1.0{VϵVf}=ϕA+ϕF=0°
通常A(jω)是一个容性capacitive的(通常放大器是具有RC特性,信号频率越高,输出越小),所以要去寻找一个感性的F(jω)
如果不需要注入 Vin 仍然能维持震荡,说明上面的并联系统的导纳之和为零,因为当出现Vin 到 Vout 的压差后,F(jω) 消耗的电流能被 A(jω) 补回来,两者压差相同,但是电流互补之和为零,那么必然意味着导纳之和为零。
Yres+YcircZres+ZcircZres+Zcirc=0=0
上面是用幅值和相位的关系去定义的,Barkhausen Criterion 另一种方式是用实部 (Real) 和虚部 (Imaginary)去定义,要求是导纳之和为0
Yres+YcircZresZcircZres+Zcirc=0=0
推导之后,整体为零意味着分子为0,那么意味着
⎩⎪⎨⎪⎧Re(Zres+Zcirc)=0Im(Zres+Zcirc)=0
¶ 2 Phase and Magnitude Stability
维持稳定振荡时,环路总的传递函数应该满足以下条件,这里的 ωs和As表示在维持稳态震荡时的角频率和幅值。
G(ωs,As)=1
这就要求满足以下的条件
Magnitude Stability: Phase Stability: dωd∣G∣<0dωd(arg G)<0
Barkhausen 判据 是震荡器能够开始振荡的判定条件,要求系统的增益大于或等于 1 且反馈信号和输入信号之间的相位差为 180 度。
幅值稳定性 和 相位稳定性 是对维持稳定振荡约束,要求幅值和相位的变化速率一定要慢下来,否者这个振荡也是不稳定的
- 如果幅值不能随频率递减,那么一个完全线性的系统,将会让振荡的幅值没有边界,将无法定义稳态振荡时的幅值。
- 如果相位的变化速率越来越快,意味着系统的相位响应不再是平稳的,反馈信号的相位就会变得不稳定。最终,这种不稳定的相位变化可能导致振荡衰减或振荡失稳(需要注意的时)。