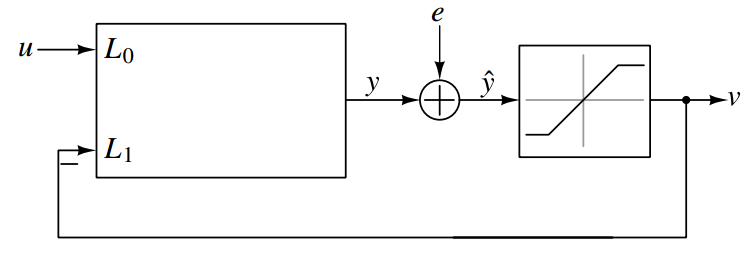
SDM的一般结构如下,L0是对输入的传递函数,L1是对反馈信号的传递函数,根据传递函数=直通增益/(1-反馈增益)这个小技巧,可以非常容易的推导出STF和NTF传递函数
V ( z ) = L 0 1 + L 1 U ( z ) + 1 1 + L 1 E ( z ) V ( z ) = 1 + L 1 L 0 U ( z ) + 1 + L 1 1 E ( z )
对这样的表达式的理解如下:
环路可实现,环路有延迟,则NTF的第一个采样的冲击响应必须为1,这个infnity其实是从冲击函数来的,让所有的延迟项(z^-1, z^-2)为0,也就是让z=∞
N T F ( z = ∞ ) = 1 N T F ( z = ∞ ) = 1
STF和NTF有相同的分母,这个分母正是系统的characteristic equation
当NTF趋于0时,L1趋于无穷大,这意味着环路滤波器L1的极点是NTF的零点,对于一个L阶的NTF函数( 1 − z − 1 ) L ( 1 − z − 1 ) L 1 / ( 1 − z − 1 ) 1 / ( 1 − z − 1 )
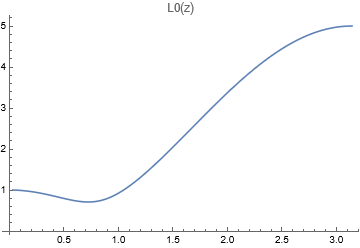
在DC处(z=1)的STF函数应该是1,L1是级联积分器,DC增益无穷大,为了让STF=1,则应该有
z = 1 L 0 ( z ) = z = 1 L 1 ( z ) z = 1 lim L 0 ( z ) = z = 1 lim L 1 ( z )
假设STF(1)=1,输入是低频信号,那么量化器的输入可以表示为
Y ( z ) = V ( z ) − E ( z ) = U ( z ) + E ( z ) N T F ( z ) − E ( z ) = U ( z ) + ( N T F ( z ) − 1 ) E ( z ) Y ( z ) = V ( z ) − E ( z ) = U ( z ) + E ( z ) N T F ( z ) − E ( z ) = U ( z ) + ( N T F ( z ) − 1 ) E ( z )
量化噪声的方差是Δ 2 / 12 Δ 2 / 1 2 ∣ ∣ h n ∣ ∣ 2 2 ∣ ∣ h n ∣ ∣ 2 2 ( Δ 2 / 12 ) ( ∣ ∣ h n ∣ ∣ 2 2 − 1 ) ( Δ 2 / 1 2 ) ( ∣ ∣ h n ∣ ∣ 2 2 − 1 )
二阶范数:
∣ ∣ h n ∣ ∣ 2 2 = ( ∑ n = 0 ∞ h 2 [ n ] ) ∣ ∣ h n ∣ ∣ 2 2 = ( n = 0 ∑ ∞ h 2 [ n ] )
从上一步推导量化器的z域输入为
Y ( z ) = S T F ( z ) U ( z ) + ( N T F ( z ) − 1 ) ( V ( z ) − Y ( z ) ) Y ( z ) = S T F ( z ) U ( z ) + ( N T F ( z ) − 1 ) ( V ( z ) − Y ( z ) )
对该表达式求反Z变换,可以得到时域表达式
y [ n ] = u [ n ] + ( h [ n ] − δ [ n ] ) ∗ ( v [ n ] − y [ n ] ) = u [ n ] + ∑ k = − ∞ n ( v [ n − k ] − y [ n − k ] ) ( h [ k ] − δ [ k ] ) y [ n ] = u [ n ] + ( h [ n ] − δ [ n ] ) ∗ ( v [ n ] − y [ n ] ) = u [ n ] + k = − ∞ ∑ n ( v [ n − k ] − y [ n − k ] ) ( h [ k ] − δ [ k ] )
对于M-Step量化器,如果输入没有overload的,那么误差最大就是Δ / 2 = 1 Δ / 2 = 1
∣ v [ n − k ] − y [ n − k ] ∣ ≤ V LSB 2 = Δ 2 = 1 ∣ v [ n − k ] − y [ n − k ] ∣ ≤ 2 V LSB = 2 Δ = 1
因此一个充分(sufficient)不必要(but not necessary)的条件(condition)是
= { u + ∑ k = − ∞ n ( ∣ v [ n − k ] − y [ n − k ] ∣ ) ⋅ ( ∣ h [ k ] − δ [ k ] ∣ ) } ⩽ + ∑ k = − ∞ n Δ 2 ( ∣ h [ k ] − δ [ k ∣ ] ) ⩽ + ∑ k = − ∞ n ∣ h [ k ] ∣ − 1 n max y = n max { u + k = − ∞ ∑ n ( ∣ v [ n − k ] − y [ n − k ] ∣ ) ⋅ ( ∣ h [ k ] − δ [ k ] ∣ ) } ⩽ n max u + k = − ∞ ∑ n 2 Δ ( ∣ h [ k ] − δ [ k ∣ ] ) ⩽ n max u + k = − ∞ ∑ n ∣ h [ k ] ∣ − 1
限制n y = M + 1 max n y = M + 1
M + 1 ⩽ u max + ∑ k = 0 n ∣ h [ k ] ∣ − 1 ∣ u ∣ m a x = m a x ∣ u [ n ] ∣ ⩽ M + 2 − ∑ k = 0 ∞ ∣ h [ k ] ∣ M + 1 ∣ u ∣ m a x ⩽ u m a x + k = 0 ∑ n ∣ h [ k ] ∣ − 1 = m a x ∣ u [ n ] ∣ ⩽ M + 2 − k = 0 ∑ ∞ ∣ h [ k ] ∣
这部分内容的具体推导可以看:
J. G. Kenney and L. R. Carley, “Design of multibit noise-shaping data converters,” Analog Integrated Circuits and Signal Processing , vol. 3, no. 3, pp. 259–272, 1993.
∑ k = 0 ∞ ∣ h k ∣ ∑ k = 0 ∞ ∣ h k ∣ h n h n N T F ( z ) = ( 1 − z − 1 ) L N T F ( z ) = ( 1 − z − 1 ) L ∥ h ∥ 1 = 2 L ∥ h ∥ 1 = 2 L
u m a x = 2 L − 1 + 2 − 2 L = 1 u m a x = 2 L − 1 + 2 − 2 L = 1
如果对于一个L+1bit的量化器,则最大的输入大约时输入的一半
u m a x = 2 L + 1 − 1 + 2 − 2 L = 2 L + 1 u m a x = 2 L + 1 − 1 + 2 − 2 L = 2 L + 1
这只是一个参考值,对于高阶,例如L=5,quantiser=2^L-1 STEP,可能比较有效,只要信号slightly higher就会造成instability;对于低阶,不满足这个条件也能正常工作,比如MOD2,他的一阶范数是4,量化器M=1,1+2-4=-1,意味着这个MOD2任何输入都不可能正常工作,偶尔超过Quantizer的量程SDM也能正常工作。
为了深入理解这个现象,量化器是非线性的,非线性表现在特定输入下,量化器的等效增益k是不同的,上述MSA的理论计算是基于k=1,多bit量化器的增益确实更接近1,而2-level quantiser的增益会低于1。
考虑到effetive quantiser gain的NTF传递函数为:
N T F k ( z ) = 1 1 + k L 1 ( z ) N T F ( z ) = 1 1 + L 1 ( z ) } ⇒ N T F k ( z ) = N T F ( z ) k + ( 1 − k ) N T F ( z ) N T F k ( z ) = 1 + k L 1 ( z ) 1 N T F ( z ) = 1 + L 1 ( z ) 1 ⎭ ⎪ ⎪ ⎬ ⎪ ⎪ ⎫ ⇒ N T F k ( z ) = k + ( 1 − k ) N T F ( z ) N T F ( z )
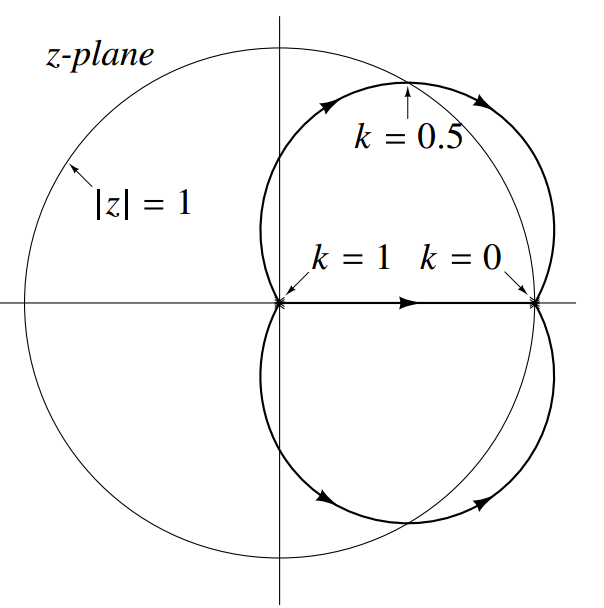
基础的N T F ( z ) = ( 1 − z − 1 ) 3 N T F ( z ) = ( 1 − z − 1 ) 3 z 3 z 3
k z 3 + ( 1 − k ) ( z − 1 ) 3 k z 3 + ( 1 − k ) ( z − 1 ) 3
随着k的增加,根轨迹为:
当k=1时,极点在原点(DC频点),当k逐渐减小到0.5以上后,极点到了单位圆外,系统开始不稳定。当k继续减小到0时,极点回到了单位原上z=1(fs/2频点)。
当输入信号u接近M时,量化器开始饱和,量化器的等效增益下降,整形的噪声下降。这造成了线性系统的极点开始向单位圆移动。随着u的进一步增大,量化器饱和,饱和导致的误差不再为0。这两个作用让k进一步减小,且饱和导致的误差的均方差进一步增大直到系统变得不稳定。此时如果averaged v不在等于输入信号u,意味着噪声整型不再存在。
不稳定的根本原因,还是因为量化器饱和,而不是量化过程本身。一个无限范围的量化器永远不会有稳定性问题。通过以上的讨论,MSA取决于quantiser的输入信号中的噪声方差,也就是取决于NTF的最大增益,所以稳定性也受信号频率的影响。作者重申reiterated,最好的方法还是去仿真。
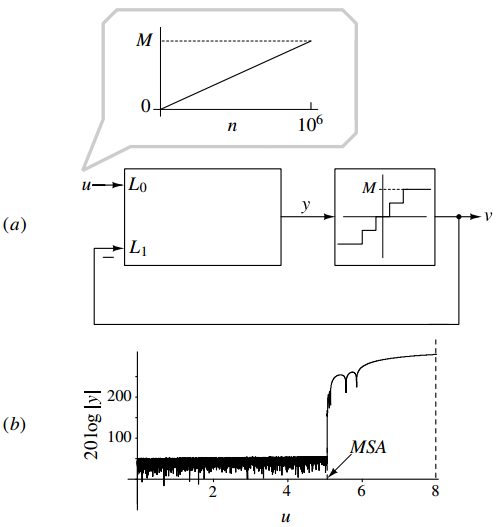
方法一:扫描一个幅值变化的正弦记录信号,频率在in-band内部,当幅值amplitude超过MSA后,quantiser的输入将会变得无穷大,noise-shaping lost,SQNR迅速下降
方法二:另一个方法是输入一个缓慢上升的ramp信号,然后去检测quantiser的输入
An alternative technique is to excite the modulator with a ramp that slowly varies from 0 to full scale, say, over a million samples, as shown in Figure below. The magnitude of the quantizer input is monitored. When u exceeds the MSA, the modulator becomes unstable, and approaches infinity. The value of u when this happens is the MSA.
之前推导MSA时,基本思想是保证量化器的输入不要太大,量化器的输入包含环路内的噪声以及输入信号,如果环路内的噪声过大,则输入信号就被压缩。环路内的噪声的均方值,在量化器的LSB决定后,只是取决于NTF的传递函数。NTF的传递函数低频很低,高频特别高,计算y处的噪声时可以通过积分的方法求出,也可以通过帕萨瓦尔定理通过时域的方法求出。不管是哪种方法,根本原因都是高阶NTF下,噪声的方差(功率)太大了!
再次理解NTF这个高通滤波函数,3个在原点的极点(对任何频率的信号抑制都是一样的,等于没有抑制),3个在z=1处的零点>
N T F ( z ) = ( 1 − z − 1 ) 3 = ( z − 1 ) 3 z 3 N T F ( z ) = ( 1 − z − 1 ) 3 = z 3 ( z − 1 ) 3
这个可以通过一个Z平面向量的角度去理解,一个单位幅值的信号随着频率变化z = e j ω z = e j ω ω = [ − π , π ] ω = [ − π , π ] ( z − 1 ) ( z − 1 ) ( A = 1 , ω = 0 ) ( A = 1 , ω = 0 ) z 3 z 3 ( z − 0 ) 3 ( z − 0 ) 3
认识到NTF的高频增益过高,导致总的NTF的方差过大,因此可以降低NTF的高频增益。
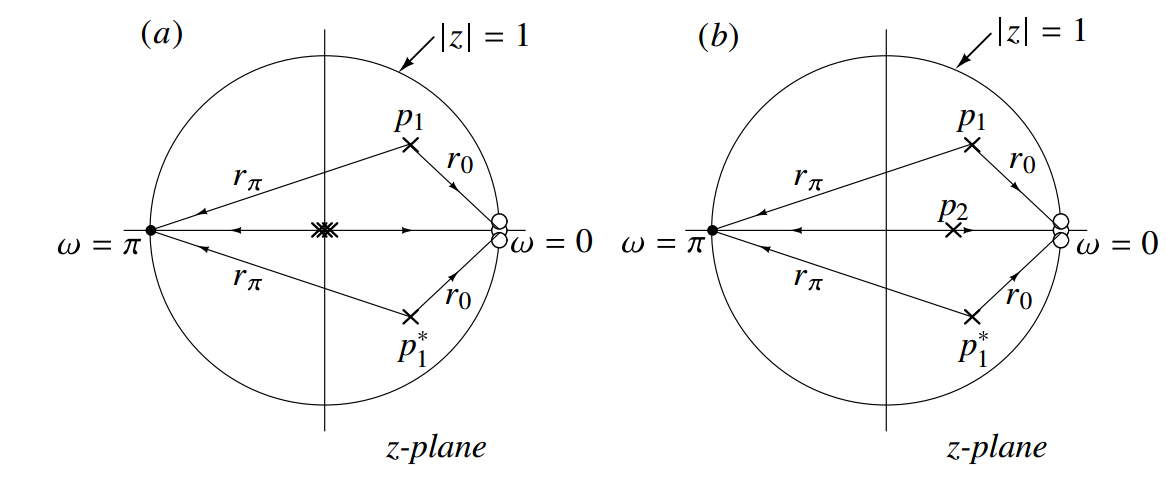
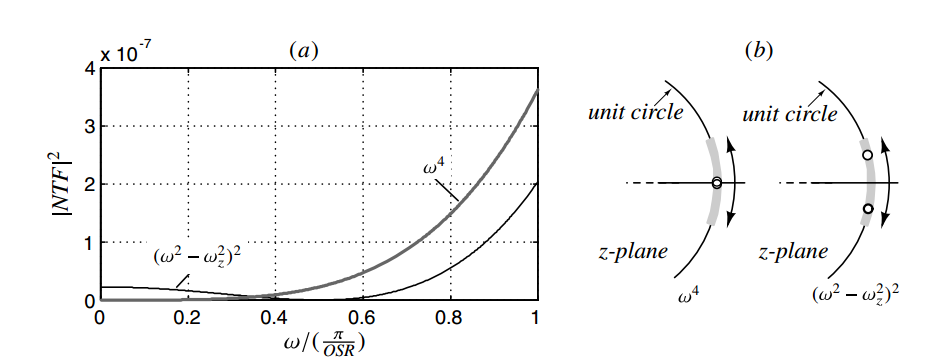
其中一个办法是增加一个低通滤波器,如下图(a)。增加低通滤波器的后果是提供了系统的阶数,而且低频下的增益比较高,N T F ( z ) / G ( z ) N T F ( z ) / G ( z ) 1 / G ( ω = 0 ) 1 / G ( ω = 0 ) 1 / r 0 2 > 1 1 / r 0 2 > 1 1 / G ( ω = π ) 1 / G ( ω = π ) 1 / r π 2 < 1 1 / r π 2 < 1 ω 3 ω 3 ω 3 / G ( 1 ) = k ω 3 ω 3 / G ( 1 ) = k ω 3
另一个办法直接移动NTF函数现有的极点,如下图(b)。低频增益这个暂且放下,但是增加阶数这个难以接受。
那么NTF函数可以表示为
N T F ( z ) = ( 1 − z − 1 ) 3 D ( z ) N T F ( z ) = D ( z ) ( 1 − z − 1 ) 3
由于none-delay free环路的问题,要求N T F ( z → ∞ ) = 1 N T F ( z → ∞ ) = 1 D ( z ) D ( z ) D ( z ) = ∏ ( 1 − z − 1 p k ) D ( z ) = ∏ ( 1 − z − 1 p k )
带内噪声,还是利用MOD1时推导CH2-MOD1#^bdff68|噪声功率谱密度公式
I B N ≈ V L S B 2 12 1 π ∫ 0 π O S R ω 2 L d ω = V L S B 2 12 π ( 2 L + 1 ) ( π O S R ) 2 L + 1 I B N ≈ 1 2 V L S B 2 π 1 ∫ 0 O S R π ω 2 L d ω = 1 2 π ( 2 L + 1 ) V L S B 2 ( O S R π ) 2 L + 1
由于动了极点,导致低频增益提高了k>1倍,因此
N T F ≈ k 1 ω 2 L N T F ≈ k 1 ω 2 L
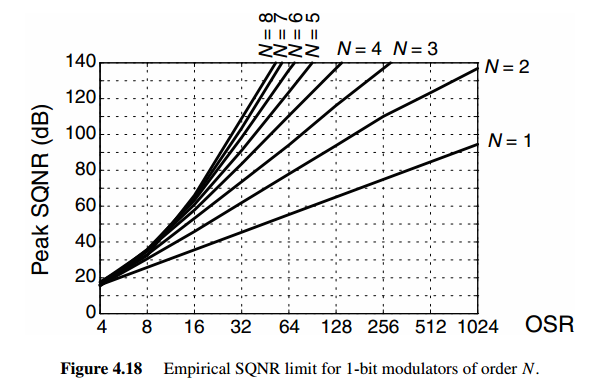
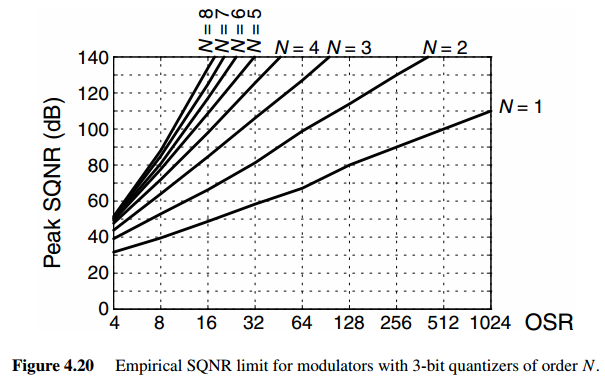
那么SQNR的OSR效率为
SNR O S R + S D M N − S N R = 10 10 P s i g n a l P n o i s e π ( 2 L ) ( 2 L + 1 ) O S R ( 2 L + 1 ) P s i g n a l P n o i s e = 10 10 ( 2 L + 1 ) O S R ( 2 L + 1 ) π ( 2 L ) = 10 10 2 L + 1 π ( 2 L ) + 10 ( 2 L + 1 ) log O S R = 10 10 2 L + 1 π ( 2 L ) + 10 ( 2 L + 1 ) 2 10 2 O S R SNR O S R + S D M N − S N R = 1 0 log 1 0 P n o i s e P s i g n a l P n o i s e ( 2 L + 1 ) O S R ( 2 L + 1 ) π ( 2 L ) P s i g n a l = 1 0 log 1 0 π ( 2 L ) ( 2 L + 1 ) O S R ( 2 L + 1 ) = 1 0 log 1 0 π ( 2 L ) 2 L + 1 + 1 0 ( 2 L + 1 ) log O S R = 1 0 log 1 0 π ( 2 L ) 2 L + 1 + log 2 1 0 1 0 ( 2 L + 1 ) log 2 O S R
仅考虑和OSR相关项,由SQNR到ENOB是除以6.02,那么则有
Δ ENOB = 10 ( 2 L + 1 ) 2 10 × 1 6.02 × 2 O S R Δ ENOB = log 2 1 0 1 0 ( 2 L + 1 ) × 6 . 0 2 1 × log 2 O S R
所以对于2阶的SQNR的OSR效率是2.5bit/log2(OSR),三阶效率3.5bit/log2(OSR),四阶效率是4.5bit/log2(OSR),五阶的效率是5.5bit/log2(OSR)
10*(2*order + 1)/Log2[10]/6.02 /. order -> {2, 3, 4, 5} // N
{2.50025, 3.50035, 4.50045, 5.50055}
通过改变零点位置,同样可以让带内积分总噪声低一些,对于一个二阶的NTF,对IBN对ωz求导,求导结果为0时,得到极值,这样就得到了optimal ωz,这个具体的实现,可以看CRFB等结构。
IBN = V L S B 2 12 π ∫ 0 π O S R k 1 ω 4 d ω IBN z e r o ( ω z ) = V L S B 2 12 π ∫ 0 π O S R T k 1 ( ω 2 − ω z 2 ) 2 d ω ω z , o p t = π O S R 1 3 IBN IBN z e r o ( ω z ) ω z , o p t = 1 2 π V L S B 2 ∫ 0 O S R π k 1 ω 4 d ω = 1 2 π V L S B 2 ∫ 0 O S R T π k 1 ( ω 2 − ω z 2 ) 2 d ω = O S R π 3 1
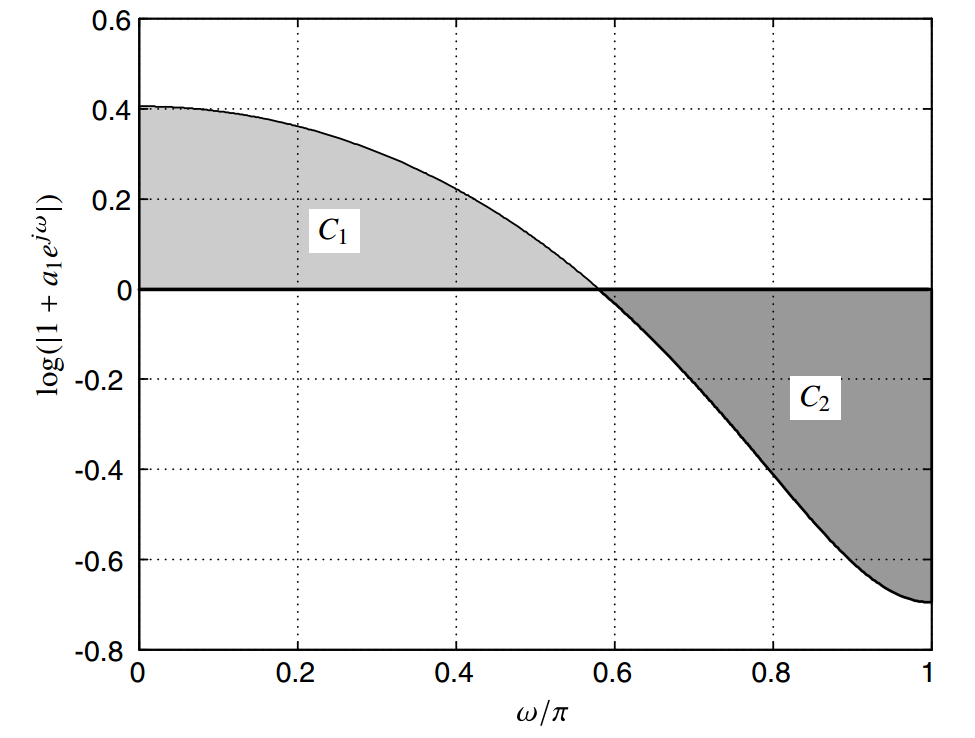
For a stable modulator, the poles must lie inside the unit circle. The zeros of the NTF lie on the unit circle. This is a direct consequence of the infeasibility of physically realizing a delayfree feedback loop.
C. Mohtadi, “Bode’s integral theorem for discrete-time systems,” IEE Proceedings on Control Theory and Applications , vol. 137, no. 2, pp. 57–66, 1990.
这个定理总之就是,在伯德图中,0dB以上的部分与0dB以下的部分面积是相等的。
如果 ∣ a 1 ∣ ⩽ 1 ∣ a 1 ∣ ⩽ 1
∫ 0 π log ∣ 1 + a 1 e − j ω ∣ d ω = 0 ∫ 0 π log ∣ 1 + a 1 e − j ω ∣ d ω = 0
如果 roots of 1 + a 2 z − 1 + a 3 z − 2 1 + a 2 z − 1 + a 3 z − 2
∫ 0 π log ∣ 1 + a 1 e − j ω + a 2 e − j 2 ω ∣ d ω = 0 ∫ 0 π log ∣ 1 + a 1 e − j ω + a 2 e − j 2 ω ∣ d ω = 0
以上的这个结论(不会推导?),可以得出
∫ 0 π log ∣ N T F ( e j ω ) ∣ d ω = ∫ 0 π log ∣ ( 1 + b 1 e − j ω ) ( 1 + b 2 e − j ω + 1 + b 3 e − j 2 ω ) … ( 1 + a 1 e − j ω ) ( 1 + a 2 e − j ω + 1 + a 3 e − j 2 ω ) … ∣ = 0 ∫ 0 π log ∣ N T F ( e j ω ) ∣ d ω = ∫ 0 π log ∣ ∣ ∣ ∣ ∣ ( 1 + a 1 e − j ω ) ( 1 + a 2 e − j ω + 1 + a 3 e − j 2 ω ) … ( 1 + b 1 e − j ω ) ( 1 + b 2 e − j ω + 1 + b 3 e − j 2 ω ) … ∣ ∣ ∣ ∣ ∣ = 0
从图形上看,C1和C2的面积是一样的
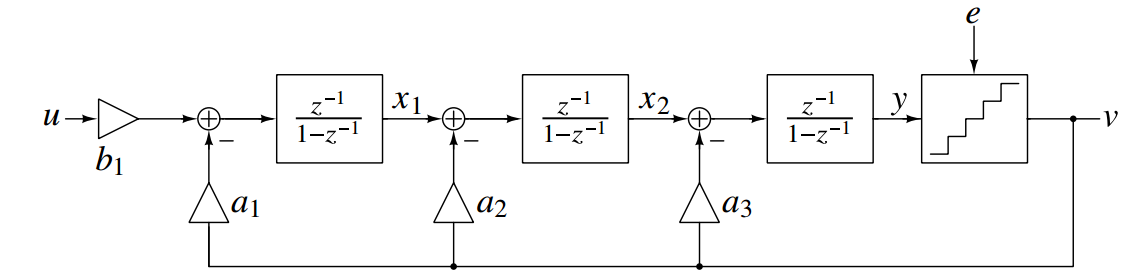
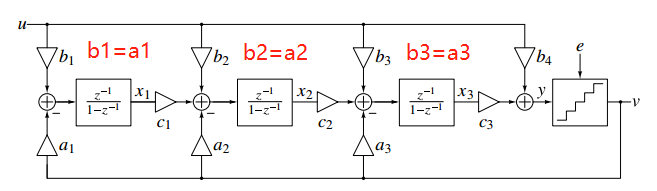
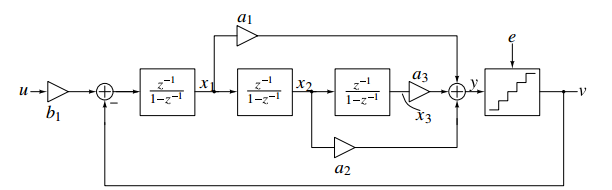
Cascode Integrator with Feedback Structure
可以直接写出u→v和v→y的传递函数
L 0 = b 1 z − 3 ( 1 − z − 3 ) 3 L 1 = a 1 z − 3 ( 1 − z − 1 ) 3 + a 2 z − 2 ( 1 − z − 1 ) 2 + a 3 z − 1 ( 1 − z − 1 ) L 0 L 1 = ( 1 − z − 3 ) 3 b 1 z − 3 = ( 1 − z − 1 ) 3 a 1 z − 3 + ( 1 − z − 1 ) 2 a 2 z − 2 + ( 1 − z − 1 ) a 3 z − 1
这样传递函数
N T F ( z ) = 1 1 + L 1 = ( 1 − z − 1 ) 3 ( 1 − z − 1 ) 3 + a 3 ( 1 − z − 1 ) 2 + a 2 ( 1 − z − 1 ) + a 1 z − 3 S T F ( z ) = L 0 1 + L 1 = b 1 z − 3 ( 1 − z − 1 ) 3 + a 3 ( 1 − z − 1 ) 2 + a 2 ( 1 − z − 1 ) + a 1 z − 3 N T F ( z ) S T F ( z ) = 1 + L 1 1 = ( 1 − z − 1 ) 3 + a 3 ( 1 − z − 1 ) 2 + a 2 ( 1 − z − 1 ) + a 1 z − 3 ( 1 − z − 1 ) 3 = 1 + L 1 L 0 = ( 1 − z − 1 ) 3 + a 3 ( 1 − z − 1 ) 2 + a 2 ( 1 − z − 1 ) + a 1 z − 3 b 1 z − 3
NTF和STF有着相同的分母denominator,NTF有3个zeros在z=1,这3个zero来自于L1的3个极点1 / ( 1 − z − 3 ) = z 3 / ( z − 1 ) 3 1 / ( 1 − z − 3 ) = z 3 / ( z − 1 ) 3
a 1 a 1 a 2 a 2 a 3 a 3 STF的DC增益(z=1),STF(1)=b1/a1
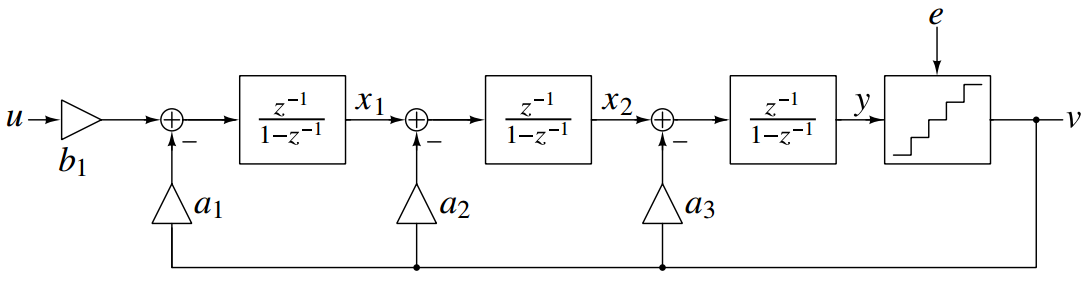
想让环路稳定,每一级的积分器的平均输入应该为零,否则任何DC都会让Integrator跑飞。
通常a3远大于a1,因为a1的反馈路径延迟长、增益高容易让环路不稳定,快速足够大的a3反馈利于环路稳定。
现在分析每一级积分器的输出,v包含输入信号u加上3rd order shaped noise;x1是v的积分结果,是一个2nd order shaped noise加上a2*u。u的分量直接从v来的原因,因为这是DC量,也就是平均值,DC的平均输入一定是0。e的分量是从积分器来,而不是从v来,这是因为噪声的平均值一定是0,这是一个扰动交流量,在understanding SDM的分析中,似乎忽略了v里面中的3rd order noise?答案是没有,因为分析的是INT的输出,v中的3rd order noise经过加法器注入到了下一级integrator中,在分析x1-x3时时一致的,a1-a3三路3rd order noiser分别在x1-x3中有所体现。
x 1 = a 2 u + 2 n d o r d e r s h a p e d n o i s e x 2 = a 3 u + 1 s t a n d 2 n d o r d e r s h a p e d n o i s e x 3 = u + 0 s t a n d 1 s t a n d 2 n d o r d e r s h a p e d n o i s e x 1 x 2 x 3 = a 2 u = a 3 u = u + 2 n d + 1 s t a n d 2 n d + 0 s t a n d 1 s t a n d 2 n d o r d e r s h a p e d n o i s e o r d e r s h a p e d n o i s e o r d e r s h a p e d n o i s e
之前分析过的,Y ( z ) = S T F ( z ) U ( z ) + ( 1 − N T F ( z ) ) E ( z ) Y ( z ) = S T F ( z ) U ( z ) + ( 1 − N T F ( z ) ) E ( z )
x3(y)这个点是决定摆幅的地方,y点具有最大的摆幅(VDD-N/P管的Vds饱和电压),这样可以简化quantiser的设计难度。通常u是85%的fullscale,基于上述分析的第5点,a3>a2>a1,很容易造成x2和x1的摆幅超过y点。
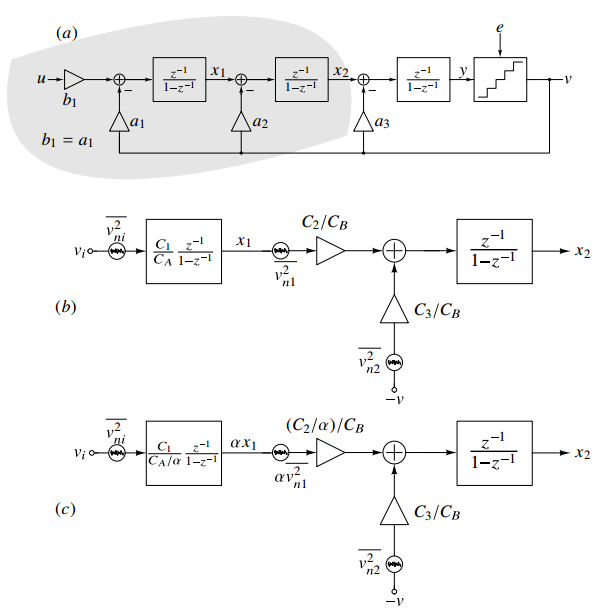
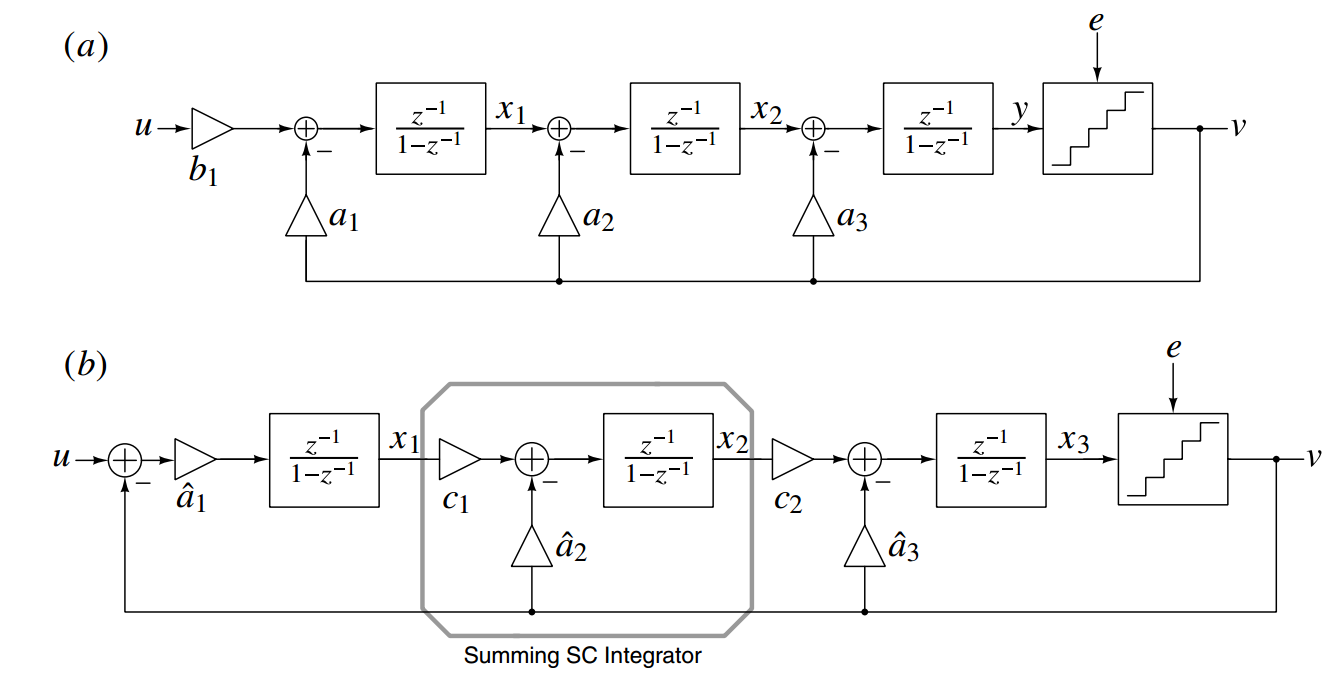
To prevent premature saturation of internal states, they must be scaled without affecting the transfer functions L0 and L1 of the loop filter. This process is called dynamic-range scaling.
考虑(a)图中的灰色部分,在(b)图的体现为:
(a)图中,令增益为为1,则有b 1 = a 1 b 1 = a 1 u − v = v i u − v = v i
(b)图中,C 1 / C A C 1 / C A b 1 b 1 C 2 / C B C 2 / C B C 3 / C B C 3 / C B a 2 a 2
(c)图中,将x1的输出scale到α x 1 α x 1 C A C A C A / α C A / α C 2 C 2 C 2 / α C 2 / α
缩放x1的过程,也需要考虑噪声的抑制情况,如果α > 1 α > 1 C 2 C 2 α α α 2 α 2
一旦NTF和结构确定,将没有freedom去调节STF;
N阶modulator需要N个DAC,设计复杂度高;
如果quantizer很很多step,则量化噪声的摆幅可以忽略,a ^ 3 a ^ 3 a 3 a 3 x 2 x 2 x 3 x 3 c 2 c 2 a ^ 3 a ^ 3 L 1 = a ^ 2 c 2 = a ^ 2 a ^ 3 L 1 = a ^ 2 c 2 = a ^ 2 a ^ 3 a 2 a 2 a ^ 2 = a 2 / a ^ 3 = a 2 / a 3 a ^ 2 = a 2 / a ^ 3 = a 2 / a 3 c 1 = a ^ 2 = a 2 / a 3 c 1 = a ^ 2 = a 2 / a 3 a ^ 1 c 1 c 2 = a 1 a ^ 1 c 1 c 2 = a 1 a ^ 1 = a 1 / a 2 a ^ 1 = a 1 / a 2 a 1 < a 2 < a 3 a 1 < a 2 < a 3 a ^ 1 a ^ 1 C 1 C 1 a ^ 1 a ^ 1 C A C A
更严重的是,每一级都有输入信号,摆幅很大,因此非线性的问题比较大。
当我们意识CIFB的问题,都是因为x1,x2,x3中含有输入信号u,那可以通过增加前馈通路,这样反馈信号中的u是由前馈通路提供的,不再由积分器提供。这样每一级积分器可以提供高于1的增益,以实现更好的面积效率与噪声抑制效果。
L 0 1 + L 1 = b 4 ( 1 − z − 1 ) 3 + b 3 c 3 ( 1 − z − 1 ) 3 + b 2 c 2 c 3 ( 1 − z − 1 ) 3 + b 1 c 1 c 2 c 3 z − 3 D ( z ) 1 + L 1 L 0 = D ( z ) b 4 ( 1 − z − 1 ) 3 + b 3 c 3 ( 1 − z − 1 ) 3 + b 2 c 2 c 3 ( 1 − z − 1 ) 3 + b 1 c 1 c 2 c 3 z − 3
与之带来的问题是,STF出现peaking, 这个免费的FIR竟然是一个高通滤波器!STF的增益可能破坏稳定性?
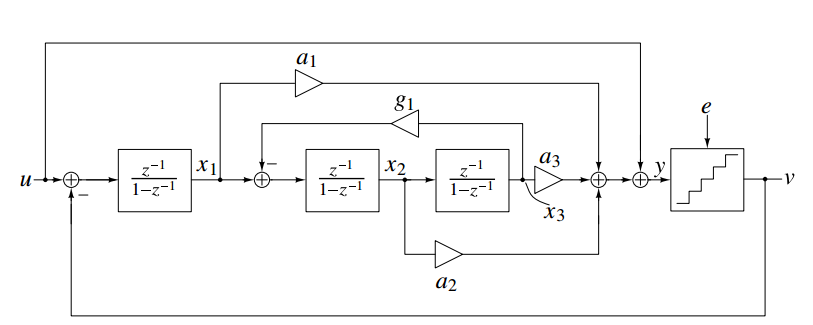
与此同时,如果NTF传递函数存在再non-zero frequency处的零点,参考CH4-High-Order-SDM#^d796d1|NTF零点:降低带内噪声 ,可以得到更高的SQNR,
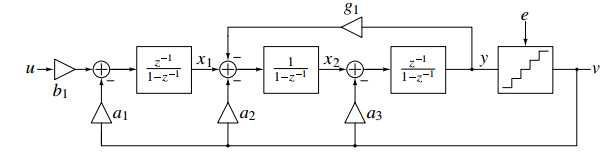
原来的零点在z=1,现在还是让零点出现在单位圆上,但是不在0度的位置,也就是出现复数零点。NTF的复数零点对应L1的复数极点(因为L1的分母,在经过1/(1+L1)后,变到了分子上和1上)。
如上图所示:第一个积分器贡献了L1的DC极点,第二个和第三个积分器与反馈路径g1贡献了一个复平面极点,还是利用反馈传递公式,直接推导
R ( z ) = z − 1 ( 1 − z − 1 ) 2 1 + g 1 z − 1 ( 1 − z − 1 ) 2 = z z 2 − ( 2 − g 1 ) z + 1 R ( z ) = 1 + g 1 ( 1 − z − 1 ) 2 z − 1 ( 1 − z − 1 ) 2 z − 1 = z 2 − ( 2 − g 1 ) z + 1 z
L1极点的位置是:
z 2 − ( 2 − g 1 ) z + 1 = 0 z 2 − ( 2 − g 1 ) z + 1 = 0
这些零点的位置在单位圆上的± ω 1 ± ω 1 cos ( ω 1 ) = 1 − ( g 1 / 2 ) cos ( ω 1 ) = 1 − ( g 1 / 2 ) ω 1 ≪ 1 ω 1 ≪ 1 ω 1 ≈ g 1 ω 1 ≈ g 1
根的判别式,( 2 − g 1 ) 2 − 4 = g 1 2 − 2 g 1 ( 2 − g 1 ) 2 − 4 = g 1 2 − 2 g 1 g 1 < 2 g 1 < 2
r e j ω 1 ⋅ r e − j ω 1 = 1 ⇒ r = 1 ; r e j ω 1 + r e − j ω 1 = 2 − g 1 ⇒ r 1 在 x 轴的投影为 ( 1 − g 1 / 2 ) r e j ω 1 ⋅ r e − j ω 1 r e j ω 1 + r e − j ω 1 = 1 ⇒ r = 1 ; = 2 − g 1 ⇒ r 1 在 x 轴 的 投 影 为 ( 1 − g 1 / 2 )
所以,有以上结论。
在这resonator中有一个non-delaying integrator,这个确保了产生的零点在单位圆上。对于较高的采样速率,希望每一级积分器都是delayed,以此降低对放大器的设计要求。如果仍然加入一个delayed integrator,会导致在单位圆以外的零点,由于在一个很强的反馈系统中,本地的osscilation会被抑制。
R ( z ) = z − 2 ( 1 − z − 1 ) 2 1 + g 1 z − 2 ( 1 − z − 1 ) 2 = z z 2 − 2 z + g 1 + 1 R ( z ) = 1 + g 1 ( 1 − z − 1 ) 2 z − 2 ( 1 − z − 1 ) 2 z − 2 = z 2 − 2 z + g 1 + 1 z
这样的话
r e j ω 1 ⋅ r e − j ω 1 = g 1 + 1 ⇒ r = 1 + g 1 ; r e j ω 1 + r e − j ω 1 = 2 ⇒ r 1 在 x 轴的投影为 1 r e j ω 1 ⋅ r e − j ω 1 r e j ω 1 + r e − j ω 1 = g 1 + 1 ⇒ r = 1 + g 1 ; = 2 ⇒ r 1 在 x 轴 的 投 影 为 1
此时的的零点位置是z=1\pm j\sqrt
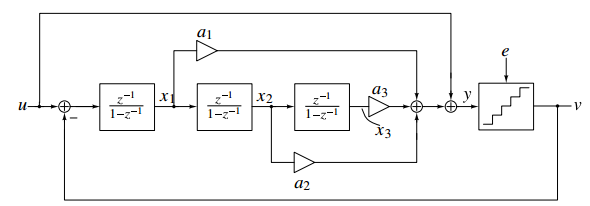
下图是一个CIFF的结构,没有FeedBack的路径。可以非常简单的写出L1(v→y)的表达式:
L 1 ( z ) = a 1 ( z − 1 1 − z − 1 ) + a 2 ( z − 1 1 − z − 1 ) 2 + a 3 ( z − 1 1 − z − 1 ) 3 L 0 ( z ) = b 1 L 1 ( z ) = L 1 ( z ) L 1 ( z ) = a 1 ( 1 − z − 1 z − 1 ) + a 2 ( 1 − z − 1 z − 1 ) 2 + a 3 ( 1 − z − 1 z − 1 ) 3 L 0 ( z ) = b 1 L 1 ( z ) = L 1 ( z )
在这个结构中,为了让信号增益为1,则
b 1 = 1 b 1 = 1
[Low Distortion CIFF] x1,x2的平均值都是0,因为他们是积分器2,3唯一的输入信号。由于y包含信号u,以及shaped quantization noise (NTF-1),详见CH3-MOD2#3 量化器输入 。输入信号只能是由x3提供的(因为通过x3处的u信号是经过三次积分的,是最大的信号)。
对于第三级积分器+a 3 a 3 a 3 a 3 a 3 a 3 u u
观察一下u→y的传递函数,非常显然,这样STF恒为1,在所有频率上的增益都是1。
L 0 ( z ) = 1 + L 1 ( z ) L 0 ( z ) = 1 + L 1 ( z )
回到基本的CIFF,有如下特点:
CIFF在Dynamic Scaling之后,第一级积分器的增益可以很高,因为他只需要处理shaped quantization noise,他的输出没有信号成分。第一级的高增益对后级的非线性抑制能力很强。
CIFF的另一个优点是只需要一个DAC。
CIFF的反馈路径,是一个fast+precision的共同体,这对高速设计的要求很高,尤其是用作contunous time SDM的时候。
同理,L1所有的极点都在DC处,为了优化零点,可以引入resonator,得到CRFB的结构
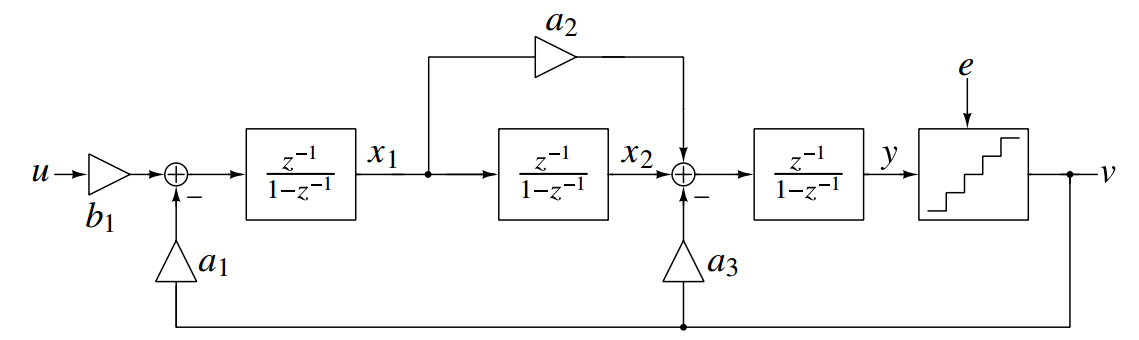
¶ 7.8 Loop Filter with feedfoward and feedback CIFF-B
这个结构结合了CIFF和CIFB的优点
CIFB优点:精确反馈a1和反馈反馈a3是相对独立的,decoupled,因此对于高速设计(CTSDM)友好(为何CTSDM友好,有必要继续看下去)
CIFF优点:x1作为是第二级积分器的唯一输入,因此x1本身的信号很小,这样再经过dynamic sclaling后,第一级的积分器增益可以很大,有助于抑制后级的非理想因素(噪声,非线性)。
x2需要包含部分输入信号,fisrt-order-shaped-quantization-noise + a3*u